توسط علی رضا نقش نیلچی
| یکشنبه نهم دی ۱۴۰۳ | 8:3
کلیات
[ ویرایش ]
روابط بین مختصات فضا-زمان اولیه و غیر آغاز شده تبدیلات لورنتس است ، هر مختصات در یک فریم تابع خطی همه مختصات در قاب دیگر است و توابع معکوس تبدیل معکوس هستند. بسته به نحوه حرکت قاب ها نسبت به یکدیگر و نحوه جهت گیری آنها در فضا نسبت به یکدیگر، پارامترهای دیگری که جهت، سرعت و جهت را توصیف می کنند وارد معادلات تبدیل می شوند.
تبدیلهایی که حرکت نسبی را با سرعت ثابت (یکنواخت) و بدون چرخش محورهای مختصات فضا توصیف میکنند، بوستهای لورنتس یا بوستهای ساده نامیده میشوند و سرعت نسبی بین فریمها پارامتر تبدیل است. نوع اصلی دیگر تبدیل لورنتز چرخش در مختصات فضایی است، این بوستها تبدیلهای اینرسی هستند زیرا هیچ حرکت نسبی وجود ندارد، فریمها به سادگی کج میشوند (و به طور پیوسته نمیچرخند)، و در این مورد کمیتهای تعیینکننده چرخش هستند. پارامترهای تبدیل (به عنوان مثال، نمایش محور-زاویه ، یا زوایای اویلر ، و غیره). ترکیبی از چرخش و تقویت یک تبدیل همگن است که مبدا را به مبدا تبدیل می کند.
گروه کامل لورنتس O(3, 1) همچنین شامل دگرگونیهای ویژهای است که نه چرخش هستند و نه تقویت، بلکه انعکاسهایی در یک صفحه از مبدا هستند. دو مورد از این موارد را می توان مشخص کرد. وارونگی مکانی که در آن مختصات مکانی همه رویدادها در علامت معکوس می شود و وارونگی زمانی که در آن مختصات زمانی برای هر رویداد علامت خود را معکوس می کند.
افزایش ها را نباید با جابجایی های صرف در فضازمان ترکیب کرد. در این حالت، سیستم مختصات به سادگی جابجا شده و هیچ حرکت نسبی وجود ندارد. با این حال، اینها همچنین به عنوان تقارن های وادار شده توسط نسبیت خاص به حساب می آیند زیرا بازه فضازمان را ثابت می گذارند. ترکیبی از یک چرخش با یک تقویت، و به دنبال آن یک تغییر در فضازمان، تبدیل ناهمگن لورنتس است ، عنصری از گروه پوانکاره، که گروه ناهمگن لورنتس نیز نامیده میشود.
فرمول فیزیکی لورنتس را تقویت می کند
[ ویرایش ]
اطلاعات بیشتر: مشتقات تبدیلات لورنتس
تحول هماهنگ کنید
[ ویرایش ]

مختصات فضا-زمان یک رویداد، همانطور که توسط هر ناظر در چارچوب مرجع اینرسی اندازه گیری می شود (در پیکربندی استاندارد) در حباب های گفتار نشان داده شده است.
بالا: فریم F با سرعت v در امتداد محور x قاب F حرکت می کند .
پایین: فریم F با سرعت − v در امتداد محور x قاب F حرکت می کند . [ 12 ]
یک ناظر "ایستا" در قاب F رویدادها را با مختصات t , x , y , z تعریف می کند . یک قاب دیگر F ′ با سرعت v نسبت به F حرکت می کند و ناظری در این قاب “متحرک” F ′ رویدادها را با استفاده از مختصات t ′, x ′, y , z ′ تعریف می کند .
محورهای مختصات در هر فریم موازی هستند ( محورهای x و x موازی هستند، محورهای y و y موازی هستند و محورهای z و z موازی هستند)، عمود بر یکدیگر باقی می مانند و حرکت نسبی در امتداد xx منطبق است . " تبرها. در t = t ′ = 0 ، مبدا هر دو سیستم مختصات یکسان است،
( x, y, z ) = ( x ′, y ′, z ′) = (0, 0, 0)
. به عبارت دیگر، زمان و موقعیت در این رویداد همزمان است. اگر همه اینها پابرجا باشند، سیستم مختصات در پیکربندی استاندارد یا همگام میگویند .
اگر ناظری در F یک رویداد t , x , y , z را ثبت کند ، آنگاه ناظری در F همان رویداد را با مختصات ثبت می کند [ 13 ]
تقویت لورنتس ( x جهت )

که در آن v سرعت نسبی بین فریم ها در جهت x است ، c سرعت نور است و

( گامای کوچک ) عامل لورنتس است .
در اینجا، v پارامتر تبدیل است ، برای یک تقویت معین، یک عدد ثابت است، اما می تواند یک محدوده پیوسته از مقادیر را بگیرد. در تنظیمات مورد استفاده در اینجا، سرعت نسبی مثبت v > 0 حرکت در امتداد جهت های مثبت محورهای xx ' است ، سرعت نسبی صفر v = 0 حرکت نسبی نیست، در حالی که سرعت نسبی منفی v <0 حرکت نسبی در امتداد جهات منفی است. محورهای xx . بزرگی سرعت نسبی v نمی تواند برابر یا بیشتر از c باشد ، بنابراین فقط سرعت های زیر نوری - c < v < c مجاز هستند. محدوده مربوط به γ 1 ≤ γ < ∞ است .
اگر v خارج از این محدودیت ها باشد، تبدیل ها تعریف نمی شوند . در سرعت نور ( v = c ) γ نامتناهی است و سریعتر از نور ( v > c ) γ عدد مختلطی است که هر کدام تبدیل ها را غیرفیزیکی می کند. مختصات مکان و زمان کمیت های قابل اندازه گیری هستند و از نظر عددی باید اعداد واقعی باشند.
به عنوان یک تبدیل فعال ، یک ناظر در F' متوجه میشود که مختصات رویداد در جهتهای منفی محورهای xx «تقویت میشوند ، زیرا - v در تبدیلها. این اثر معادل سیستم مختصات F' تقویت شده در جهت های مثبت محورهای xx را دارد ، در حالی که رویداد تغییر نمی کند و به سادگی در یک سیستم مختصات دیگر، یک تبدیل غیرفعال نشان داده می شود .
روابط معکوس ( t , x , y , z بر حسب t ′, x ′, y ′, z ′ ) را می توان با حل جبری مجموعه اصلی معادلات یافت. راه کارآمدتر استفاده از اصول فیزیکی است. در اینجا F قاب "ایستا" است در حالی که F قاب "متحرک" است. طبق اصل نسبیت، هیچ چارچوب مرجع ممتازی وجود ندارد، بنابراین تبدیلهای F به F باید دقیقاً همان شکل تبدیلهای F به F را داشته باشند . تنها تفاوت این است که F با سرعت - v نسبت به F ' حرکت می کند (یعنی سرعت نسبی همان مقدار است اما جهت مخالف است). بنابراین اگر ناظری در F " رویداد t "، x "، y "، z " را یادداشت کند ، آنگاه ناظری در F همان رویداد را با مختصات یادداشت می کند .
تقویت معکوس لورنتس ( جهت x )

و مقدار γ بدون تغییر باقی می ماند. این «ترفند» صرفاً معکوس کردن جهت سرعت نسبی با حفظ بزرگی آن، و مبادله متغیرهای اولیه و غیر آغاز شده، همیشه برای یافتن تبدیل معکوس هر بوست در هر جهتی کاربرد دارد. [ 14 ] [ 15 ]
گاهی اوقات استفاده از β = v / c ( بتا کوچک ) به جای v راحت تر است ، به طوری که

که به وضوح تقارن در تبدیل را نشان می دهد. از محدوده مجاز v و تعریف β ، −1 < β < 1 است . استفاده از β و γ در سراسر ادبیات استاندارد است.
هنگامی که سرعت افزایش در جهت بردار دلخواه با بردار تقویت است
در جهت بردار دلخواه با بردار تقویت است ، سپس تبدیل از یک سیستم مختصات فضازمان بدون پرایم به یک سیستم مختصات اولیه توسط [ 16 ] ، [1] داده می شود.
، سپس تبدیل از یک سیستم مختصات فضازمان بدون پرایم به یک سیستم مختصات اولیه توسط [ 16 ] ، [1] داده می شود.

جایی که عامل لورنتس است
 . تعیین کننده ماتریس تبدیل +1 و ردیابی آن است
. تعیین کننده ماتریس تبدیل +1 و ردیابی آن است . معکوس تبدیل با معکوس کردن علامت داده می شود
. معکوس تبدیل با معکوس کردن علامت داده می شود . مقدار
. مقدار تحت تغییر شکل ثابت است.
تحت تغییر شکل ثابت است.
تبدیلهای لورنتس را میتوان به گونهای مشتق کرد که شبیه چرخشهای دایرهای در فضای سه بعدی با استفاده از توابع هذلولی باشد . برای افزایش در جهت x ، نتایج هستند
تقویت لورنتس ( جهت x با سرعت ζ )

که در آن ζ ( زتا با حروف کوچک ) پارامتری به نام سرعت است (بسیاری از نمادهای دیگر از جمله θ، φ، φ، η، ψ، ξ استفاده میشود ). با توجه به شباهت زیاد به چرخش مختصات فضایی در فضای سه بعدی در صفحات دکارتی xy، yz، و zx، تقویت لورنتس را می توان به عنوان چرخش هذلولی مختصات فضازمان در صفحات زمان دکارتی xt، yt و zt در نظر گرفت . فضای چهار بعدی مینکوفسکی پارامتر ζ زاویه هذلولی چرخش است که مشابه زاویه معمولی برای چرخش های دایره ای است. این تبدیل را می توان با نمودار مینکوفسکی نشان داد .
توابع هذلولی از تفاوت بین مجذورهای زمان و مختصات مکانی در بازه فضازمان به جای مجموع ناشی می شوند. اهمیت هندسی توابع هذلولی را می توان با گرفتن x = 0 یا ct = 0 در تبدیل ها مشاهده کرد. با مربع و تفریق نتایج، می توان منحنی های هذلولی با مقادیر مختصات ثابت اما ز متغیر را استخراج کرد که منحنی ها را بر اساس هویت پارامتری می کند.cosh2ز-گناه2ز=1.
برعکس، محورهای ct و x را میتوان برای مختصات متفاوت اما ζ ثابت ساخت . تعریف

ارتباط بین مقدار ثابت سرعت و شیب محور ct در فضازمان را فراهم می کند. نتیجه این دو فرمول هذلولی، هویتی است که با عامل لورنتس مطابقت دارد

با مقایسه تبدیلهای لورنتس از نظر سرعت و سرعت نسبی یا با استفاده از فرمولهای بالا، ارتباطات بین β ، γ و
.
گرفتن مماس هذلولی معکوس سرعت را می دهد.
از آنجایی که −1 < β < 1 , به دنبال −∞ < ζ < ∞ می آید . از رابطه بین ζ و β ، سرعت مثبت ζ > 0 حرکت در جهت مثبت محورهای xx ' است ، سرعت صفر ζ = 0 حرکت نسبی نیست، در حالی که سرعت منفی ζ < 0 حرکت نسبی در امتداد جهات منفی محور است. محورهای xx .
تبدیلهای معکوس با مبادله مقادیر اولیه و غیر پرایم شده برای تغییر قابهای مختصات، و نفی سرعت ζ → - ζ به دست میآیند زیرا این معادل با نفی سرعت نسبی است. بنابراین،
تقویت معکوس لورنتس ( جهت x با سرعت ζ )

تبدیلهای معکوس را میتوان با در نظر گرفتن مواردی که x '=0 و ct ' = 0 مشاهده کرد .
تاکنون تبدیلات لورنتس در یک رویداد اعمال شده است . اگر دو رویداد وجود داشته باشد، یک جدایی مکانی و فاصله زمانی بین آنها وجود دارد. از خطی بودن تبدیلهای لورنتس به دست میآید که میتوان دو مقدار مختصات مکان و زمان را انتخاب کرد، تبدیلهای لورنتس را میتوان برای هر کدام اعمال کرد، سپس برای بدست آوردن تبدیلهای لورنتس تفاوتها از آن کسر کرد.

با روابط معکوس

که در آن Δ ( دلتای بزرگ ) تفاوت مقادیر را نشان می دهد. به عنوان مثال، Δ x = x 2 - x 1 برای دو مقدار مختصات x و غیره.
این دگرگونیها در تفاوتها به جای نقاط مکانی یا لحظههای زمانی به دلایلی مفید هستند:
- در محاسبات و آزمایشها، طولهای بین دو نقطه یا بازههای زمانی است که اندازهگیری میشوند یا مورد علاقه هستند (مثلاً طول یک وسیله نقلیه در حال حرکت یا مدت زمانی که طول میکشد تا از یک مکان به مکان دیگر سفر کند).
- با کوچک کردن بینهایت اختلاف و تقسیم معادلات و تکرار فرآیند برای تبدیل شتاب، میتوان به آسانی تبدیلهای سرعت را به دست آورد.
- اگر سیستم های مختصات هرگز منطبق نباشند (یعنی در پیکربندی استاندارد نباشند)، و اگر هر دو ناظر بتوانند روی یک رویداد توافق کنند
- t 0 , x 0 , y 0 , z 0 در F و t 0 ′, x 0 , y 0 ′ ، z 0 " در F " ، سپس آنها می توانند از آن رویداد به عنوان مبدأ استفاده کنند، و تفاوت مختصات فضازمان، تفاوت بین مختصات آنها و این مبدا است، به عنوان مثال، Δ x = x − x 0 ، Δ x ′ = x ′ − x 0 ′ و غیره.
پیامدهای فیزیکی
[ ویرایش ]
یکی از الزامات مهم تبدیلهای لورنتس، تغییرناپذیری سرعت نور است، واقعیتی که در اشتقاق آنها استفاده میشود و در خود تبدیلها وجود دارد. اگر در F معادله یک پالس نور در امتداد جهت x x = ct باشد ، در F ′ تبدیلات لورنتس
x ′ = ct ′
را به دست می دهند و بالعکس، برای هر − c < v < c .
برای سرعت های نسبی بسیار کمتر از سرعت نور، تبدیل های لورنتس به تبدیل گالیله کاهش می یابد : [ 17 ] [ 18 ]

مطابق با اصل مطابقت . گاهی گفته می شود که فیزیک غیر نسبیتی فیزیک «کنش آنی در فاصله» است. [ 19 ]
سه پیشبینی نادرست، اما درست از تحولات عبارتند از:






 جریان یکنواخت در سراسر پرتو، با جهت میدان مغناطیسی همانطور که نشان داده شده است.
جریان یکنواخت در سراسر پرتو، با جهت میدان مغناطیسی همانطور که نشان داده شده است.







 تعداد یکنواخت حلقه های جریان در طول شیر برقی. و جهت میدان مغناطیسی همانطور که نشان داده شده است.
تعداد یکنواخت حلقه های جریان در طول شیر برقی. و جهت میدان مغناطیسی همانطور که نشان داده شده است.




 تعداد حلقه های پولوئیدی که به طور یکنواخت توزیع شده اند، با جهت میدان مغناطیسی همانطور که نشان داده شده است.
تعداد حلقه های پولوئیدی که به طور یکنواخت توزیع شده اند، با جهت میدان مغناطیسی همانطور که نشان داده شده است.



 ، که
، که همچنین می تواند منفی باشد تا موقعیت را در جهت مخالف در محور نشان دهد، و
همچنین می تواند منفی باشد تا موقعیت را در جهت مخالف در محور نشان دهد، و











 بار منبع نقطه است،
بار منبع نقطه است،
 بردار موقعیت از منبع نقطه تا نقطه در فضا است،
بردار موقعیت از منبع نقطه تا نقطه در فضا است، بردار سرعت ذره باردار است،
بردار سرعت ذره باردار است، نسبت سرعت ذره باردار تقسیم بر سرعت نور و
نسبت سرعت ذره باردار تقسیم بر سرعت نور و ).
).


 بردار موقعیت ذره بر حسب زمان است،
بردار موقعیت ذره بر حسب زمان است، نقطه در فضا است،
نقطه در فضا است، زمانی است که فیلدها اندازه گیری می شوند و
زمانی است که فیلدها اندازه گیری می شوند و سرعت نور است این معادله زمان لازم برای حرکت نور از ذره به نقطه ای در فضا را از زمان اندازه گیری برای یافتن زمان پیدایش میدان ها کم می کند. منحصر به فرد بودن راه حل برای
سرعت نور است این معادله زمان لازم برای حرکت نور از ذره به نقطه ای در فضا را از زمان اندازه گیری برای یافتن زمان پیدایش میدان ها کم می کند. منحصر به فرد بودن راه حل برای  ،
، برای ذرات باردار که کندتر از سرعت نور حرکت می کنند معتبر است.
برای ذرات باردار که کندتر از سرعت نور حرکت می کنند معتبر است. 

 و
و پتانسیل اسکالر الکتریکی و پتانسیل بردار مغناطیسی در گیج لورنتس،
پتانسیل اسکالر الکتریکی و پتانسیل بردار مغناطیسی در گیج لورنتس، بردار واحدی است که از ذره باردار به نقطه ای در فضا اشاره می کند،
بردار واحدی است که از ذره باردار به نقطه ای در فضا اشاره می کند، سرعت ذره تقسیم بر سرعت نور و
سرعت ذره تقسیم بر سرعت نور و
 که در آن
که در آن 

 که در آن انتگرال یک
که در آن انتگرال یک 
 نیروی
نیروی 







 که در آن
که در آن  جریان محصور شده توسط آن حلقه است. قانون آمپر همیشه برای جریان های ثابت معتبر است و می تواند برای محاسبه میدان
جریان محصور شده توسط آن حلقه است. قانون آمپر همیشه برای جریان های ثابت معتبر است و می تواند برای محاسبه میدان  که در آن
که در آن 







 که در آن
که در آن  در جهت از متوسط 2 به متوسط 1 اشاره می کند.
در جهت از متوسط 2 به متوسط 1 اشاره می کند. 






 که در آن جهت
که در آن جهت 










 ; در یک ماده مغناطیسی، مقادیر در هر طرف این معادله با میدان
; در یک ماده مغناطیسی، مقادیر در هر طرف این معادله با میدان 
 که
که




 .
.
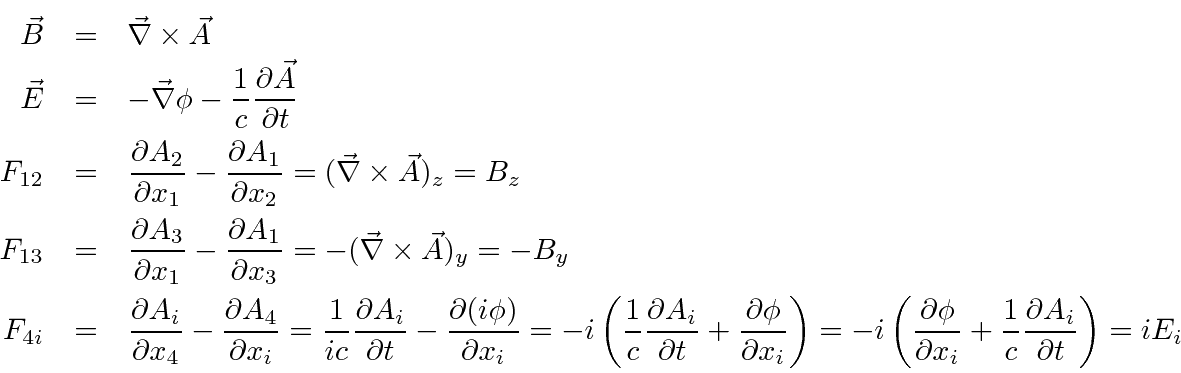
![{\displaystyle {\begin{aligned}\mathbf {E} '&=\mathbf {E} +\mathbf {v} \times \mathbf {B} \\[1ex]\mathbf {B} '&=\mathbf {B} -{\frac {1}{c^{2}}}\mathbf {v} \times \mathbf {E} ,\end{تراز شده}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1a7962757d0368c6a3f4ac952602feedc39adedd)





![{\displaystyle \mathbf {F} =q\left[\mathbf {E} +\mathbf {v} \times \mathbf {B} \راست].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e464ca1df543d0e3799230f7b9c78c3d980d2734)
 در حالی که در قاب رسانا که آهنربا در حال حرکت است، نیرو نیز در جهت منفی y است و اکنون فقط به دلیل میدان E با مقدار:
در حالی که در قاب رسانا که آهنربا در حال حرکت است، نیرو نیز در جهت منفی y است و اکنون فقط به دلیل میدان E با مقدار:
![{\displaystyle {\begin{aligned}x'&=\gamma \left(x-vt\right),&x&=\gamma \left(x'+vt'\right),\\[1ex]t'&= \gamma \left(t-{\tfrac {vx}{c^{2}}}\right),&t&=\gamma \left(t'+{\tfrac {vx'}{c^{2}}}\right).\end{تراز شده}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c26eb88c26443a7e159464a8086ba7807f8a5ad0)

 که کاملا موافق است بنابراین نیروی وارد بر بار در هر دو فریم یکسان نیست ، اما مطابق با نسبیت تغییر میکند.
که کاملا موافق است بنابراین نیروی وارد بر بار در هر دو فریم یکسان نیست ، اما مطابق با نسبیت تغییر میکند. ، یا به طور خاص، که سرعت آن با
، یا به طور خاص، که سرعت آن با  .
. 
 انرژی است،
انرژی است،  حرکت است، و
حرکت است، و جرم سکون است، وقتی جرم سکون به صفر میل می کند، مثلاً برای یک فوتون، یا تکانه به بزرگی میل می کند، مثلا برای یک پروتون با سرعت زیاد، این رابطه به یک پراکندگی خطی فرو می ریزد، یعنی
جرم سکون است، وقتی جرم سکون به صفر میل می کند، مثلاً برای یک فوتون، یا تکانه به بزرگی میل می کند، مثلا برای یک پروتون با سرعت زیاد، این رابطه به یک پراکندگی خطی فرو می ریزد، یعنی



 (T4)
(T4)![{\displaystyle {\begin{aligned}&U(\Lambda,a)\Psi _{p_{1}\sigma _{1}n_{1};p_{2}\sigma _{2}n_{2}; \cdots }\\={}&e^{-ia_{\mu }\left[(\Lambda p_{1})^{\mu }+(\Lambda p_{2})^{\mu }+\cdots \right]}{\sqrt {\frac {(\Lambda p_{1})^{0}(\Lambda p_{2})^ {0}\cdots }{p_{1}^{0}p_{2}^{0}\cdots }}}\left(\sum _{\sigma _{1}'\sigma _{2}'\cdots }D_{\sigma _{1}'\sigma _{1}}^{(j_{1})}\left[W(\Lambda ,p_{ 1})\right]D_{\sigma _{2}'\sigma _{2}}^{(j_{2})}\left[W(\Lambda ,p_{2})\right]\cdots \right)\Psi _{\Lambda p_{1}\sigma _{1}'n_{1};\Lambda p_{2}\sigma _{2}'n_ {2};\cdots }،\end{تراز شده}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f3b8eb18b9a1a818885bf7f841ef3cfae600ebd8)











 همراه با عملیات
همراه با عملیات ![{\displaystyle [J_{x},J_{y}]=J_{z}\,,\quad [K_{x},K_{y}]=-J_{z}\,,\quad [J_{x },K_{y}]=K_{z}\,,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b6995567bdc143f734b5511a2db9d6809eb2ed30) که در آن براکت
که در آن براکت  . به طور خلاصه، جبر دروغ به عنوان یک
. به طور خلاصه، جبر دروغ به عنوان یک  یک تناظر یک به یک بین محله های به اندازه کافی کوچک مبدأ جبر دروغ و محله های عنصر هویت گروه Lie فراهم می کند. در مورد گروه لورنتس، نقشه نمایی فقط
یک تناظر یک به یک بین محله های به اندازه کافی کوچک مبدأ جبر دروغ و محله های عنصر هویت گروه Lie فراهم می کند. در مورد گروه لورنتس، نقشه نمایی فقط  که فقط تمام مختصات مکانی و
که فقط تمام مختصات مکانی و  که فقط مختصات زمان را نفی می کند، زیرا این تبدیل ها بازه فضازمان را ثابت می گذارند. در اینجا
که فقط مختصات زمان را نفی می کند، زیرا این تبدیل ها بازه فضازمان را ثابت می گذارند. در اینجا  که در آن C یک ستون ثابت است که حاوی ترجمه در زمان و مکان است. اگر C ≠ 0 باشد، این تبدیل ناهمگن لورنتس یا
که در آن C یک ستون ثابت است که حاوی ترجمه در زمان و مکان است. اگر C ≠ 0 باشد، این تبدیل ناهمگن لورنتس یا 


 که در آن شاخص های اولیه نشان دهنده شاخص های A در قاب اولیه هستند. برای یک شیء با
که در آن شاخص های اولیه نشان دهنده شاخص های A در قاب اولیه هستند. برای یک شیء با  که در آن
که در آن  که در آن
که در آن  زمانی که به عنوان ماتریس در نظر گرفته شود،
زمانی که به عنوان ماتریس در نظر گرفته شود، 

 و ممکن است در این نماد بنویسد
و ممکن است در این نماد بنویسد
 در حال اجرا بر روی یک شاخص ردیفی از ماتریس است که نشان دهنده
در حال اجرا بر روی یک شاخص ردیفی از ماتریس است که نشان دهنده 
 (T1)
(T1) (T2)
(T2) (T3)
(T3) با ضرب ماتریس به عنوان عملیات ترکیب، گروهی به نام "گروه لورنتس محدود" را تشکیل می دهد و
با ضرب ماتریس به عنوان عملیات ترکیب، گروهی به نام "گروه لورنتس محدود" را تشکیل می دهد و  که در آن عبارات مرتبه بالاتر نشان داده نشده قابل چشم پوشی هستند زیرا
که در آن عبارات مرتبه بالاتر نشان داده نشده قابل چشم پوشی هستند زیرا 
 که در آن
که در آن 
![{\displaystyle {\begin{alignedat}{3}K_{x}&={\begin{bmatrix}0&1&0&0\\1&0&0&0\\0&0&0&0\\0&0&0&0\\\end{bmatrix}}\,,\quad &K_{y}&={\begin{bmatrix}0&0&1&0\\0&0&0&0\\1&0&0&0\\0&0&0&0\end{bmatrix}}\,,\quad &K_{z}&={\begin{bmatrix}0&0&0&1\\0&0&0&0\\0&0&0&0\\1&0&0&0\end{bmatrix}}\\[10mu]J &J_{y}&={\begin{bmatrix}0&0&0&0\\0&0&0&1\\0&0&0&0\\0&-1&0&0\end{bmatrix}}\,,\quad &J_{z}&={\begin{bmatrix}0&0&0&0\\0&0&-1&0\\0&1&0&0\\0&0&0&0\end{bmatrix}}\end{alignedat}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ef8328def4199ca17bbbd9aa048bb59b78d0dd8b)

 ک
ک

 زیرا ژنراتورها رفت و آمد نمی کنند. برای توضیح چگونگی یافتن عوامل یک تبدیل عمومی لورنتز بر حسب یک تقویت و یک چرخش در اصل (این معمولاً یک عبارت قابل درک از نظر ژنراتورهای
زیرا ژنراتورها رفت و آمد نمی کنند. برای توضیح چگونگی یافتن عوامل یک تبدیل عمومی لورنتز بر حسب یک تقویت و یک چرخش در اصل (این معمولاً یک عبارت قابل درک از نظر ژنراتورهای 


 و تحت یک تبدیل لورنتس
و تحت یک تبدیل لورنتس  جایی که
جایی که  در این مقاله مشخص شده است
در این مقاله مشخص شده است . این مجموعه همراه با ضرب ماتریس یک
. این مجموعه همراه با ضرب ماتریس یک  و این معادله ماتریسی شامل شرایط کلی در تبدیل لورنتس برای اطمینان از عدم تغییر بازه فضازمان است. در نظر گرفتن
و این معادله ماتریسی شامل شرایط کلی در تبدیل لورنتس برای اطمینان از عدم تغییر بازه فضازمان است. در نظر گرفتن ![{\displaystyle \left[\det(\Lambda )\right]^{2}=1\quad \Rightarrow \quad \det(\Lambda )=\pm 1}](https://wikimedia.org/api/rest_v1/media/math/render/svg/644cba522b579c35fc5d0bf38af241b989dde40f)
 انجام ضربهای ماتریس بلوکی شرایط کلی را در
انجام ضربهای ماتریس بلوکی شرایط کلی را در  مفید است؛
مفید است؛ 









 ،
، ،
، ، و
، و همه زیر گروهها را تشکیل میدهند، مجموعههایی حاوی تبدیلهای نامناسب و/یا ضد زمان بدون تبدیلهای متعامد مناسب کافی (مثلاً
همه زیر گروهها را تشکیل میدهند، مجموعههایی حاوی تبدیلهای نامناسب و/یا ضد زمان بدون تبدیلهای متعامد مناسب کافی (مثلاً ،
، ،
، ) زیر گروه تشکیل نمی دهند.
) زیر گروه تشکیل نمی دهند. ، بنابراین به گفته یک ناظر متحرک، رویدادها دیگر همزمان نیستند.
، بنابراین به گفته یک ناظر متحرک، رویدادها دیگر همزمان نیستند.
 سپس تحولات هستند
سپس تحولات هستند



 و "بردار سرعت" را می توان به صورت تعریف کرد،
و "بردار سرعت" را می توان به صورت تعریف کرد، که هر کدام در برخی زمینه ها به عنوان مخفف مفیدی عمل می کنند. بزرگی ζ قدر مطلق اسکالر سرعت محدود به 0 ≤ ζ < ∞ است که با محدوده 0 ≤ β < 1 مطابقت دارد .
که هر کدام در برخی زمینه ها به عنوان مخفف مفیدی عمل می کنند. بزرگی ζ قدر مطلق اسکالر سرعت محدود به 0 ≤ ζ < ∞ است که با محدوده 0 ≤ β < 1 مطابقت دارد .
![{\displaystyle \mathbf {u} '={\frac {1}{1-{\frac {\mathbf {v} \cdot \mathbf {u} }{c^{2}}}}}\left[{ \frac {\mathbf {u} }{\gamma _{\mathbf {v} }}}-\mathbf {v} +{\frac {1}{c^{2}}}{\frac {\gamma _{\mathbf {v} }}{\gamma _{\mathbf {v} }+1}}\left(\mathbf {u} \ cdot \mathbf {v} \right)\mathbf {v} \right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4d9ce52162b9b5960496a83093a8241a3736852c)


![{\displaystyle {\begin{تراز شده}&c^{2}(t_{2}-t_{1})^{2}-(x_{2}-x_{1})^{2}-(y_{2}-y_ {1})^{2}-(z_{2}-z_{1})^{2}\\[ 6pt]={}&c^{2}(t_{2}'-t_{1}')^{2}-(x_{2}'-x_{1}')^{2}-(y_{2 }'-y_{1}')^{2}-(z_{2}'-z_{1}')^{2}\quad {\text{(همه رویدادهای 1، 2)}}.\end{تراز شده}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d685ef5891f02b82c2656cc341f2016d231c4549)
![{\displaystyle {\begin{تراز شده}&c^{2}t^{2}-x^{2}-y^{2}-z^{2}=c^{2}t'^{2}- x'^{2}-y'^{2}-z'^{2}\\[6pt]{\text{یا}}\quad &c^{2}t_{1}t_{2}-x_{1}x_{2}-y_{1}y_{2}-z_{1}z_{2}=c^{2}t'_{ 1}t'_{2}-x'_{1}x'_{2}-y'_{1}y'_{2}-z'_{1}z'_{2}\end{ تراز شده}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f78e5280c899e10f32769743cf58e272651c33e4)



 نشان دهنده سرعت محدود به جهت
نشان دهنده سرعت محدود به جهت 
 یک شکل معادل از تبدیل
یک شکل معادل از تبدیل 




.jpg)


.jpg)










 که در آن
که در آن 
 یک
یک  چیزی را تشکیل می دهد که مبنای حرکت نامیده می شود . این «مبنا» مبنایی به معنای معمول ریاضی نیست. برای یک چیز، از آنجایی که توابع عادی نیستند، در عوض به یک تابع دلتا بهنجار می شوند ،
چیزی را تشکیل می دهد که مبنای حرکت نامیده می شود . این «مبنا» مبنایی به معنای معمول ریاضی نیست. برای یک چیز، از آنجایی که توابع عادی نیستند، در عوض به یک تابع دلتا بهنجار می شوند ، 
 جایی که
جایی که  زیرا اگر ذره اندازه گیری شود، 100% احتمال دارد که در جایی باشد .
زیرا اگر ذره اندازه گیری شود، 100% احتمال دارد که در جایی باشد . در این وبلاگ به ریاضیات و کاربردهای آن و تحقیقات در آنها پرداخته می شود. مطالب در این وبلاگ ترجمه سطحی و اولیه است و کامل نیست.در صورتی سوال یا نظری در زمینه ریاضیات دارید مطرح نمایید .در صورت امکان به آن می پردازم. من دوست دارم برای یافتن پاسخ به سوالات و حل پروژه های علمی با دیگران همکاری نمایم.در صورتی که شما هم بامن هم عقیده هستید با من تماس بگیرید.
در این وبلاگ به ریاضیات و کاربردهای آن و تحقیقات در آنها پرداخته می شود. مطالب در این وبلاگ ترجمه سطحی و اولیه است و کامل نیست.در صورتی سوال یا نظری در زمینه ریاضیات دارید مطرح نمایید .در صورت امکان به آن می پردازم. من دوست دارم برای یافتن پاسخ به سوالات و حل پروژه های علمی با دیگران همکاری نمایم.در صورتی که شما هم بامن هم عقیده هستید با من تماس بگیرید.