مدار RLC موازی

تجزیه و تحلیل مدار RLC موازی
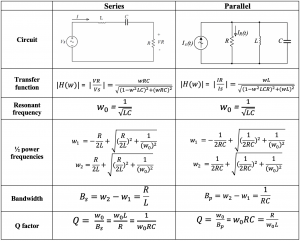
مدار RLC موازی دقیقاً برعکس مدار سری است که در آموزش قبلی به آن نگاه کردیم، اگرچه برخی از مفاهیم و معادلات قبلی هنوز هم کاربرد دارند.
با این حال، تجزیه و تحلیل مدارهای RLC موازی می تواند از نظر ریاضی کمی دشوارتر از مدارهای RLC سری باشد، بنابراین در این آموزش در مورد مدارهای RLC موازی، فقط اجزای خالص در این آموزش فرض شده اند تا همه چیز ساده باشد.
این بار به جای اینکه جریان در اجزای مدار مشترک باشد، ولتاژ اعمال شده در حال حاضر برای همه مشترک است، بنابراین ما باید جریان های انشعابی را از طریق هر عنصر پیدا کنیم. امپدانس کل، Z یک مدار RLC موازی با استفاده از جریان مدار مشابه جریان مدار موازی DC محاسبه می شود، تفاوت این بار در این است که به جای امپدانس از ادمیتانس استفاده می شود. مدار RLC موازی زیر را در نظر بگیرید.
مدار RLC موازی

در مدار RLC موازی فوق، میتوانیم ببینیم که ولتاژ تغذیه، V S برای هر سه جزء مشترک است در حالی که جریان تغذیه I S از سه قسمت تشکیل شده است. جریان عبوری از مقاومت، I R ، جریان عبوری از سلف، I L و جریان عبوری از خازن، I C.
اما جریانی که از هر شاخه عبور می کند و بنابراین هر جزء با یکدیگر و همچنین با جریان تغذیه متفاوت خواهد بود . مجموع جریان گرفته شده از منبع تغذیه، مجموع ریاضی سه جریان شاخه منفرد نیست، بلکه مجموع برداری آنها خواهد بود.
مانند مدار سری RLC، ما میتوانیم این مدار را با استفاده از روش فازور یا بردار حل کنیم، اما این بار نمودار برداری ولتاژ را با سه بردار جریان که نسبت به ولتاژ ترسیم شده است، مرجع خواهد داشت. نمودار فازور برای مدار RLC موازی با ترکیب سه فاز جداگانه برای هر جزء و اضافه کردن جریان ها به صورت برداری تولید می شود.
از آنجایی که ولتاژ در سراسر مدار برای هر سه عنصر مدار مشترک است، میتوانیم از آن به عنوان بردار مرجع استفاده کنیم که سه بردار جریان نسبت به آن در زوایای مربوطه خود کشیده شدهاند. جریان بردار I S حاصل از جمع دو بردار I L و I C و سپس افزودن این مجموع به بردار باقیمانده I R بدست می آید . زاویه حاصل بین V و I S زاویه فاز مدار مطابق شکل زیر خواهد بود.
نمودار فازور برای مدار RLC موازی

از نمودار فازور در سمت راست بالا میتوانیم ببینیم که بردارهای فعلی یک مثلث مستطیلی ایجاد میکنند که شامل هیپوتانوز I S ، محور افقی I R و محور عمودی I L - I C است. مثلث فعلی بنابراین میتوانیم از قضیه فیثاغورث در این مثلث جریان استفاده کنیم تا بهطور ریاضی بزرگیهای مجزای جریانهای انشعاب در امتداد محور x و محور y را بهدست آوریم که کل جریان عرضه I S این اجزا را همانطور که نشان داده شده است تعیین میکند.
مثلث فعلی برای مدار RLC موازی

از آنجایی که ولتاژ در سراسر مدار برای هر سه عنصر مدار مشترک است، جریان عبوری از هر شاخه را می توان با استفاده از قانون جریان Kirchhoff (KCL) پیدا کرد. به یاد داشته باشید که قانون فعلی یا قانون اتصال کیرشهوف بیان می کند که "کل جریان ورودی به یک اتصال یا گره دقیقا برابر با جریان خروجی از آن گره است". بنابراین جریان های ورودی و خروجی از گره A در بالا به صورت زیر ارائه می شوند:

با گرفتن مشتق، تقسیم معادله بالا بر C و سپس مرتب کردن مجدد، معادله مرتبه دوم زیر را برای جریان مدار به ما می دهد. این یک معادله مرتبه دوم می شود زیرا دو عنصر راکتیو در مدار وجود دارد، القاگر و خازن.

مخالفت با جریان جریان در این نوع مدار AC از سه جزء تشکیل شده است: X L X C و R با ترکیب این سه مقدار که امپدانس مدارها را Z . از بالا می دانیم که ولتاژ دارای دامنه و فاز یکسان در تمام اجزای یک مدار RLC موازی است. سپس امپدانس در هر جزء را می توان با توجه به جریان عبوری و ولتاژ در هر عنصر به صورت ریاضی توصیف کرد.
امپدانس مدار RLC موازی

متوجه خواهید شد که معادله نهایی برای یک مدار RLC موازی، امپدانس های پیچیده را برای هر شاخه موازی تولید می کند زیرا هر عنصر به صورت متقابل امپدانس می شود ( 1/Z ). متقابل امپدانس معمولاً پذیرش ، نماد ( Y ) نامیده می شود.
در مدارهای AC موازی، به طور کلی استفاده از پذیرش برای حل امپدانس های انشعاب پیچیده راحت تر است، به خصوص زمانی که دو یا چند امپدانس شاخه موازی درگیر هستند (به ریاضیات کمک می کند). ورودی کل مدار را می توان به سادگی با اضافه کردن ورودی های موازی پیدا کرد. بنابراین، امپدانس کل، Z T مدار مطابق شکل 1/Y T زیمنس خواهد بود.
پذیرش مدار RLC موازی

واحد اندازه گیری که اکنون معمولاً برای پذیرش استفاده می شود زیمنس است که به اختصار S نامیده می شود (واحد قدیمی mho's ℧ ، اهم برعکس). ورودی ها در شاخه های موازی با هم جمع می شوند، در حالی که امپدانس ها در شاخه های سری با هم جمع می شوند. اما اگر بتوانیم یک امپدانس متقابل داشته باشیم، می توانیم مقاومت و راکتانس متقابل داشته باشیم زیرا امپدانس از دو جزء R و X تشکیل شده است. سپس متقابل مقاومت را رسانایی و متقابل راکتانس را Susceptance می نامند .
سلوک، پذیرش و پذیرش
واحدهای مورد استفاده برای رسانایی ، پذیرش و پذیرش همگی یکسان هستند یعنی زیمنس (S) که میتوان آن را به صورت متقابل اهم یا اهم -1 نیز در نظر گرفت، اما نماد مورد استفاده برای هر عنصر متفاوت است و در یک جزء خالص این به صورت زیر داده می شود:
پذیرش (Y):
پذیرش متقابل امپدانس Z است و نماد Y داده می شود . در مدارهای AC پذیرش به عنوان سهولتی تعریف میشود که در آن مداری متشکل از مقاومتها و راکتانسها به جریان اجازه میدهد در هنگام اعمال ولتاژ با در نظر گرفتن اختلاف فاز بین ولتاژ و جریان، جریان پیدا کند.
پذیرش مدار موازی نسبت جریان فاز به ولتاژ فاز است که زاویه ورودی به امپدانس منفی است.

هدایت (G):
رسانایی متقابل مقاومت R است و نماد G به آن داده می شود . رسانایی به عنوان سهولتی تعریف میشود که در آن یک مقاومت (یا مجموعهای از مقاومتها) اجازه میدهد جریان در هنگام اعمال یک ولتاژ AC یا DC جریان یابد.

سوسپانسیون (ب):
Susceptance متقابل یک راکتانس خالص، X است و نماد B داده می شود . در مدارهای AC، susceptance به عنوان سهولتی تعریف میشود که در آن یک راکتانس (یا مجموعهای از راکتانسها) به جریان متناوب اجازه میدهد در هنگام اعمال ولتاژ با فرکانس معین، جریان یابد.
Susceptance علامت مخالف راکتانس را دارد، بنابراین حساسیت خازنی B C مثبت است، (+ve) از نظر مقدار در حالی که حساسیت القایی B L منفی، (-ve) در مقدار است.

بنابراین میتوانیم حساسیت القایی و خازنی را به صورت زیر تعریف کنیم:
![]()
در مدارهای سری AC مخالف جریان جریان امپدانس است، Z که دارای دو جزء مقاومت R و راکتانس X است و از این دو جزء میتوان یک مثلث امپدانس ساخت. به طور مشابه، در یک مدار RLC موازی، پذیرش، Y نیز دارای دو جزء، رسانایی، G و susceptance، B است. این امکان ایجاد یک مثلث پذیرش را فراهم می کند که دارای یک محور رسانایی افقی، G و یک محور عمودی، jB باشد.
مثلث پذیرش برای یک مدار RLC موازی

اکنون که یک مثلث پذیرش داریم، میتوانیم از فیثاغورث برای محاسبه قدر هر سه ضلع و همچنین زاویه فاز مانند شکل استفاده کنیم.
از فیثاغورث

سپس می توان هم پذیرش مدار و هم امپدانس را با توجه به پذیرش به صورت زیر تعریف کرد:

یک زاویه ضریب توان به ما می دهد:

از آنجایی که پذیرش، Y یک مدار RLC موازی یک کمیت پیچیده است، ورودی مربوط به شکل کلی امپدانس Z = R + jX برای مدارهای سری به صورت Y = G - jB برای مدارهای موازی نوشته می شود که در آن قسمت واقعی G است. رسانایی و قسمت خیالی jB susceptance است. در شکل قطبی این به صورت زیر داده می شود:

مدار RLC موازی مثال شماره 1
یک مقاومت 1kΩ ، یک سیم پیچ 142 mH و یک خازن 160uF همگی به صورت موازی در یک منبع تغذیه 240 ولت و 60 هرتز متصل می شوند. امپدانس مدار RLC موازی و جریان گرفته شده از منبع تغذیه را محاسبه کنید.
امپدانس مدار RLC موازی

در مدار AC، مقاومت تحت تأثیر فرکانس قرار نمی گیرد، بنابراین R = 1kΩ
راکتانس القایی، (XL ) :
![]()
راکتانس خازنی (XC ) :

امپدانس ( Z ):

جریان عرضه، ( آیا ):

مدار RLC موازی مثال شماره 2
یک مقاومت 50Ω ، یک سیم پیچ 20mH و یک خازن 5uF همگی به صورت موازی در یک منبع تغذیه 50 ولت و 100 هرتز متصل می شوند. کل جریان گرفته شده از منبع تغذیه، جریان هر شاخه، امپدانس کل مدار و زاویه فاز را محاسبه کنید. همچنین مثلث جریان و پذیرش مدار را بسازید.
مدار RLC موازی

1). راکتانس القایی، (XL ) :
![]()
2). راکتانس خازنی (XC ) :

3). امپدانس ( Z ):

4). جریان از طریق مقاومت، R ( I R ):

5). جریان عبوری از سلف، L ( I L ):

6). جریان عبوری از خازن، C ( I C ):

7). مجموع جریان عرضه، ( I S ):

8). هدایت، ( G ):

9). حساسیت القایی، ( B L ):

10). حساسیت خازنی، ( B C ):

11). پذیرش، ( Y ):

12). زاویه فاز، ( φ ) بین جریان حاصل و ولتاژ تغذیه:

مثلث فعلی و پذیرش

خلاصه مدار RLC موازی
در یک مدار RLC موازی که حاوی یک مقاومت، یک سلف و یک خازن است، جریان مدار I S مجموع فازی است که از سه جزء IR ، I L و I C با ولتاژ تغذیه مشترک برای هر سه تشکیل شده است. از آنجایی که ولتاژ تغذیه برای هر سه جزء مشترک است، هنگام ساخت مثلث جریان به عنوان مرجع افقی استفاده می شود.
شبکه های RLC موازی را می توان با استفاده از نمودارهای برداری دقیقاً مشابه مدارهای سری RLC تجزیه و تحلیل کرد. با این حال، تجزیه و تحلیل مدارهای RLC موازی از نظر ریاضی کمی دشوارتر از مدارهای RLC سری است که شامل دو یا چند شاخه جریان است. بنابراین یک مدار موازی AC را می توان به راحتی با استفاده از امپدانس متقابل به نام Admittance آنالیز کرد .
پذیرش متقابل امپدانس با توجه به نماد، Y است. مانند امپدانس، کمیت پیچیده ای است که از یک بخش واقعی و یک بخش خیالی تشکیل شده است. قسمت واقعی متقابل مقاومت است و رسانایی نامیده می شود ، نماد Y در حالی که قسمت خیالی آن راکتانس متقابل است و Susceptance نامیده می شود ، نماد B و به صورت مختلط بیان می شود: Y = G + jB با دوگانگی بین این دو مختلط. امپدانس به صورت زیر تعریف می شود:
| مدار سری | مدار موازی |
| ولتاژ، (V) | فعلی، (I) |
| مقاومت، (R) | هدایت، (G) |
| راکتانس، (X) | سوسپانسیون، (B) |
| امپدانس، (Z) | پذیرش، (Y) |
از آنجایی که سوسپانسانس متقابل راکتانس است، در یک مدار القایی، حساسیت القایی، B L از نظر مقدار منفی و در مدار خازنی، حساسیت خازنی، B C از نظر مقدار مثبت خواهد بود. دقیقا برعکس X L و X C به ترتیب.
تاکنون دیدهایم که مدارهای RLC سری و موازی حاوی راکتانس خازنی و راکتانس القایی در یک مدار هستند. اگر فرکانس را در این مدارها تغییر دهیم، باید به نقطه ای تبدیل شود که مقدار راکتانس خازنی برابر با راکتانس القایی باشد و بنابراین، X C = X L .
منبع
https://www.electronics-tutorials.ws/accircuits/parallel-circuit.html












 . حرکت عمودی پرتابه حرکت یک ذره در طول سقوط آزاد آن است. در اینجا شتاب ثابت است و برابر با g است.
. حرکت عمودی پرتابه حرکت یک ذره در طول سقوط آزاد آن است. در اینجا شتاب ثابت است و برابر با g است.  ،
، .
. که می توان آن را به صورت مجموع اجزای افقی و عمودی به صورت زیر بیان کرد:
که می توان آن را به صورت مجموع اجزای افقی و عمودی به صورت زیر بیان کرد: .
. و
و اگر زاویه پرتاب اولیه،
اگر زاویه پرتاب اولیه، ، شناخته شده است:
، شناخته شده است: ،
،
 ،
، .
. .
.

 ،
، .
. .
. .
. .
. ،
، .
. .
. . این عبارت را می توان با تبدیل معادله دکارتی همانطور که در بالا بیان شد بدست آورد
. این عبارت را می توان با تبدیل معادله دکارتی همانطور که در بالا بیان شد بدست آورد و
و .
. .
.








 ، به این معنا که،
، به این معنا که، .
. .
.


 است:
است:





.jpg)


![{\displaystyle L=\int _{a}^{b}{\sqrt {\left[r(\varphi )\right]^{2}+\left[{\tfrac {dr(\varphi )}{d \varphi }}\right]^{2}}}d\varphi }](https://wikimedia.org/api/rest_v1/media/math/render/svg/34f62c06ac2868b9ac160abe1e75a075cad9e261)

![{\displaystyle {\frac {1}{2}}\int _{a}^{b}\left[r(\varphi )\right]^{2}\,d\varphi .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9fc7958a00360514f36fabcac7cab0361c2ae068)


![{\displaystyle \left[r(\varphi _{i})\right]^{2}\pi \cdot {\frac {\Delta \varphi }{2\pi }}={\frac {1}{2 }}\left[r(\varphi _{i})\right]^{2}\Delta \varphi .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ec0cb32735f6a73076e1db62726c0eace3f000f6)

![{\displaystyle J=\det {\frac {\partial (x,y)}{\partial (r,\varphi )}}={\begin{vmatrix}{\frac {\partial x}{\partial r} }&{\frac {\partial x}{\partial \varphi }}\\[2pt]{\frac {\partial y}{\partial r}}&{\frac {\partial y}{\partial \varphi }}\end{vmatrix}}={\begin{vmatrix}\cos \varphi &-r\sin \varphi \\\sin \varphi &r\cos \varphi \end{vmatrix}}=r\cos ^{2 }\varphi +r\sin ^{2}\varphi =r.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/52a1293fcb0e90b77017c0d9176c62aa06615b9b)


.svg)
 و ناحیه بین تابع و
و ناحیه بین تابع و -axis که برابر است با
-axis که برابر است با .
.
 بردار موقعیت ( r cos( φ )، r sin( φ )) باشد ، با r و φ بسته به زمان t .
بردار موقعیت ( r cos( φ )، r sin( φ )) باشد ، با r و φ بسته به زمان t . در مسیر
در مسیر
 یک بردار واحد نرمال با صفحه حرکت است.
یک بردار واحد نرمال با صفحه حرکت است.



 گاهی اوقات به عنوان شتاب مرکزگرا و اصطلاح شناخته می شود
گاهی اوقات به عنوان شتاب مرکزگرا و اصطلاح شناخته می شود به عنوان شتاب کوریولیس . برای مثال به شانکار مراجعه کنید.
به عنوان شتاب کوریولیس . برای مثال به شانکار مراجعه کنید. 









 و
و دارای تقاطع های ممکن از سه نوع:
دارای تقاطع های ممکن از سه نوع: و
و هر کدام حداقل یک راه حل داشته باشند.
هر کدام حداقل یک راه حل داشته باشند.![[g(\theta _{i})،\theta _{i}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/8c3942e962cea54fd104a33ebac17dde8bffa819) جایی که
جایی که راه حل های معادله هستند
راه حل های معادله هستند جایی که
جایی که یک عدد صحیح است
یک عدد صحیح است جایی که
جایی که![{\displaystyle {\begin{aligned}r{\frac {du}{dr}}&=r{\frac {\partial u}{\partial x}}\cos \varphi +r{\frac {\partial u }{\partial y}}\sin \varphi =x{\frac {\partial u}{\partial x}}+y{\frac {\partial u}{\partial y}},\\[2pt]{ \frac {du}{d\varphi }}&=-{\frac {\partial u}{\partial x}}r\sin \varphi +{\frac {\partial u}{\partial y}}r\ cos \varphi =-y{\frac {\partial u}{\partial x}}+x{\frac {\partial u}{\partial y}}.\end{تراز شده}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/01d876b55918333fa5b3792a72f5254b82b86c63)
![{\displaystyle {\begin{aligned}r{\frac {d}{dr}}&=x{\frac {\partial }{\partial x}}+y{\frac {\partial }{\partial y} }\\[2pt]{\frac {d}{d\varphi }}&=-y{\frac {\partial }{\partial x}}+x{\frac {\partial }{\partial y}} .\end{تراز شده}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9f6d6d1a9e05c093275ecaf66033a4298e41fe1d)
![{\displaystyle {\begin{aligned}{\frac {du}{dx}}&={\frac {\partial u}{\partial r}}{\frac {\partial r}{\partial x}}+ {\frac {\partial u}{\partial \varphi }}{\frac {\partial \varphi }{\partial x}},\\[2pt]{\frac {du}{dy}}&={\ frac {\partial u}{\partial r}}{\frac {\partial r}{\partial y}}+{\frac {\partial u}{\partial \varphi }}{\frac {\partial \varphi }{\جزئی y}}،\end{تراز شده}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f446e4f0df07ead889d7039cec3301472fc1f9ea)
![{\displaystyle {\begin{aligned}{\frac {du}{dx}}&={\frac {\partial u}{\partial r}}{\frac {x}{\sqrt {x^{2} +y^{2}}}}-{\frac {\partial u}{\partial \varphi }}{\frac {y}{x^{2}+y^{2}}}\\[2pt] &=\cos \varphi {\frac {\partial u}{\partial r}}-{\frac {1}{r}}\sin \varphi {\frac {\partial u}{\partial \varphi }} ,\\[2pt]{\frac {du}{dy}}&={\frac {\partial u}{\partial r}}{\frac {y}{\sqrt {x^{2}+y^ {2}}}}+{\frac {\partial u}{\partial \varphi }}{\frac {x}{x^{2}+y^{2}}}\\[2pt]&=\ sin \varphi {\frac {\partial u}{\partial r}}+{\frac {1}{r}}\cos \varphi {\frac {\partial u}{\partial \varphi }}.\end {هم راستا}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8dcc66ee6a6250cc206f488bb56f976a9a8bd2e8)
![{\displaystyle {\begin{aligned}{\frac {d}{dx}}&=\cos \varphi {\frac {\partial }{\partial r}}-{\frac {1}{r}}\ sin \varphi {\frac {\partial }{\partial \varphi }}\\[2pt]{\frac {d}{dy}}&=\sin \varphi {\frac {\partial }{\partial r} }+{\frac {1}{r}}\cos \varphi {\frac {\partial }{\partial \varphi }}.\end{تراز شده}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0a08bfe016a4d8e15a933032d077bcdf8c49d41e)

![{\displaystyle {\begin{aligned}{\frac {dx}{d\varphi }}&=r'(\varphi )\cos \varphi -r(\varphi )\sin \varphi \\[2pt]{\ frac {dy}{d\varphi }}&=r'(\varphi )\sin \varphi +r(\varphi )\cos \varphi .\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/341713e0b0d484e169fb6cc867ab6a6e31b7ca65)


 و شعاع a است
و شعاع a است
 برای دایره ای با مرکز در قطب و شعاع a .
برای دایره ای با مرکز در قطب و شعاع a . 

 جایی که
جایی که زاویه ارتفاع خط است. به این معنا که،
زاویه ارتفاع خط است. به این معنا که، ، جایی که
، جایی که



.svg)











 جایی که i واحد
جایی که i واحد  و از آنجا، با
و از آنجا، با  که در آن e عدد
که در آن e عدد 



![{\displaystyle {\sqrt[{n}]{re^{i\varphi }}}={\sqrt[{n}]{r}}e^{i\varphi \over n}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9702297c60884f24c748553ecc7246eccf95a448)

 بر روی نقشه برداری شده است
بر روی نقشه برداری شده است . برای مشاهده جزییات بر روی عکس کلیک کنید.
. برای مشاهده جزییات بر روی عکس کلیک کنید.




![\sum _{n=0}^{\infty }{\frac {\prod _{k=0}^{n-1}(4k^{2}+\alpha ^{2})}{(2n) !}}z^{2n}+\sum _{n=0}^{\infty }{\frac {\alpha \prod _{k=0}^{n-1}[(2k+1)^{ 2}+\alpha ^{2}]}{(2n+1)!}}z^{2n+1}=e^{\alpha \arcsin {z}}،|z|\leq 1](https://wikimedia.org/api/rest_v1/media/math/render/svg/7690094e2c29c30c517059014511d42f93f0912a)
 (به
(به 
 ،
،  ، تولید تابع
، تولید تابع 
 )
)
![\sum _{k=1}^{\infty }{\frac {H_{k}}{k+1}}z^{k+1}={\frac {1}{2}}\left[\ ln(1-z)\right]^{2},\qquad |z|<1](https://wikimedia.org/api/rest_v1/media/math/render/svg/a1c2c3f140738f0c5c61f88f041f311fbda3a340)





 (به چند مجموعه مراجعه
(به چند مجموعه مراجعه  (به
(به 





![{\displaystyle \sum _{k=0}^{\infty }{\frac {\cos[(2k+1)\theta ]}{2k+1}}={\frac {1}{2}}\ ln \left(\cot {\frac {\theta }{2}}\right),0<\theta <\pi }](https://wikimedia.org/api/rest_v1/media/math/render/svg/d1991f46f491715b581a7037b4125c14fe65025c)
![{\displaystyle \sum _{k=0}^{\infty }{\frac {\sin[(2k+1)\theta ]}{2k+1}}={\frac {\pi }{4}} ,0<\theta <\pi }](https://wikimedia.org/api/rest_v1/media/math/render/svg/faf41e942b227c04e70af874e45bddb621602e58) ،
، 













 با استفاده از
با استفاده از  (
( ![{\displaystyle \displaystyle \sum _{n=-\infty }^{\infty }e^{-\pi n^{2}}={\frac {\sqrt[{4}]{\pi }}{ \Gamma \left({\frac {3}{4}}\right)}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4aee717a740629f569ad7c408608acb53f1ec4bd)

















 برای داشتن ارزش در
برای داشتن ارزش در 
 قسمت کسری را نشان می دهد
قسمت کسری را نشان می دهد چند جمله ای
چند جمله ای  یک
یک 
 یک
یک  تابع
تابع  تابع
تابع  یک
یک  چند
چند  ضریب
ضریب  نشان دهنده
نشان دهنده 


![{\displaystyle \sum _{k=1}^{m}k^{3}=\left[{\frac {m(m+1)}{2}}\right]^{2}={\frac {m^{4}}{4}}+{\frac {m^{3}}{2}}+{\frac {m^{2}}{4}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/83655857c974dd27c9b29de8cda04d7c65d334e3)

 (
( 

 , (
, ( 




 (نگاه کنید به
(نگاه کنید به 








 (ر.ک. میانگین
(ر.ک. میانگین  (نگاه کنید به
(نگاه کنید به 


 چند جمله ای های
چند جمله ای های 











 (
( 





 در این وبلاگ به ریاضیات و کاربردهای آن و تحقیقات در آنها پرداخته می شود. مطالب در این وبلاگ ترجمه سطحی و اولیه است و کامل نیست.در صورتی سوال یا نظری در زمینه ریاضیات دارید مطرح نمایید .در صورت امکان به آن می پردازم. من دوست دارم برای یافتن پاسخ به سوالات و حل پروژه های علمی با دیگران همکاری نمایم.در صورتی که شما هم بامن هم عقیده هستید با من تماس بگیرید.
در این وبلاگ به ریاضیات و کاربردهای آن و تحقیقات در آنها پرداخته می شود. مطالب در این وبلاگ ترجمه سطحی و اولیه است و کامل نیست.در صورتی سوال یا نظری در زمینه ریاضیات دارید مطرح نمایید .در صورت امکان به آن می پردازم. من دوست دارم برای یافتن پاسخ به سوالات و حل پروژه های علمی با دیگران همکاری نمایم.در صورتی که شما هم بامن هم عقیده هستید با من تماس بگیرید.