توسط علی رضا نقش نیلچی
| چهارشنبه هشتم آذر ۱۴۰۲ | 21:34
از ویکیپدیا، دانشنامه آزاد
این مقاله در مورد عملگر ریاضی در زمینه های اسکالر است. برای عملکرد میدانهای برداری، لاپلاس بردار را ببینید . برای توزیع احتمال لاپلاس، توزیع لاپلاس را ببینید . برای مفهوم نظری نمودار، به لاپلاسی ماتریس مراجعه کنید .
بخشی از مجموعه مقالات در مورد
حساب دیفرانسیل و انتگرال

- قضیه رول
- قضیه مقدار میانگین
- قضیه تابع معکوس
نشان می دهد
دیفرانسیل
نشان می دهد
انتگرال
نشان می دهد
سلسله
پنهان شدن
بردار
- شیب
- واگرایی
- حلقه
- لاپلاسی
- مشتق جهت دار
- اتحاد ها
قضایا
- شیب
- سبز
- استوکس
- واگرایی
- استوکس تعمیم یافته
نشان می دهد
چند متغیره
نشان می دهد
پیشرفته
نشان می دهد
تخصصی
نشان می دهد
در ریاضیات ، عملگر لاپلاس یا لاپلاسین یک عملگر دیفرانسیل است که از واگرایی گرادیان یک تابع اسکالر در فضای اقلیدسی به دست میآید . معمولاً با نمادها نشان داده می شود
 (جایی که
(جایی که عملگر nabla است )، یا
عملگر nabla است )، یا . در یک سیستم مختصات دکارتی , لاپلاسین با مجموع مشتقات جزئی دوم تابع نسبت به هر متغیر مستقل داده می شود . در سایر سیستم های مختصات ، مانند مختصات استوانه ای و کروی ، لاپلاسین نیز شکل مفیدی دارد. به طور غیررسمی، f ( p ) لاپلاسی تابع f در یک نقطه p اندازه میگیرد که مقدار میانگین f روی کرههای کوچک یا توپهایی که در مرکز p هستند، از f ( p ) چقدر انحراف دارد .
. در یک سیستم مختصات دکارتی , لاپلاسین با مجموع مشتقات جزئی دوم تابع نسبت به هر متغیر مستقل داده می شود . در سایر سیستم های مختصات ، مانند مختصات استوانه ای و کروی ، لاپلاسین نیز شکل مفیدی دارد. به طور غیررسمی، f ( p ) لاپلاسی تابع f در یک نقطه p اندازه میگیرد که مقدار میانگین f روی کرههای کوچک یا توپهایی که در مرکز p هستند، از f ( p ) چقدر انحراف دارد .
عملگر لاپلاس از نام ریاضیدان فرانسوی پیر سیمون د لاپلاس (1749-1827) نامگذاری شده است، که برای اولین بار این عملگر را برای مطالعه مکانیک سماوی به کار برد : لاپلاسین پتانسیل گرانشی ناشی از توزیع چگالی جرم معین، مضرب ثابتی از آن توزیع چگالی راه حل های معادله لاپلاس f = 0 توابع هارمونیک نامیده می شوند و پتانسیل های گرانشی ممکن را در مناطق خلاء نشان می دهند .
لاپلاسین در بسیاری از معادلات دیفرانسیل که پدیده های فیزیکی را توصیف می کنند، رخ می دهد. معادله پواسون پتانسیل های الکتریکی و گرانشی را توصیف می کند . معادله انتشار گرما و جریان سیال را توصیف می کند . معادله موج انتشار موج را توصیف می کند . و معادله شرودینگر تابع موج را در مکانیک کوانتومی توصیف می کند . در پردازش تصویر و بینایی کامپیوتری ، از اپراتور لاپلاسین برای کارهای مختلفی مانند تشخیص حباب و لبه استفاده شده است . لاپلاسین ساده ترین عملگر بیضوی است و در هسته نظریه هاج و همچنین نتایج کومولوژی د رام قرار دارد .
تعریف [ ویرایش ]
عملگر لاپلاس یک عملگر دیفرانسیل مرتبه دوم در فضای اقلیدسی n بعدی است که به عنوان واگرایی (⋅ ) از گرادیان (
) از گرادیان ( ). بنابراین اگر
). بنابراین اگر یک تابع با ارزش حقیقی دو بار متمایز است ، سپس لاپلاسی ازتابع با ارزش حقیقی است که توسط:
یک تابع با ارزش حقیقی دو بار متمایز است ، سپس لاپلاسی ازتابع با ارزش حقیقی است که توسط:

( 1 )
جایی که نمادهای اخیر از نوشتن رسمی ناشی می شوند:

به صراحت، لاپلاسین f حاصل مجموع تمام مشتقات جزئی دوم غیر مخلوط در مختصات دکارتی x i است :

( 2 )
به عنوان یک عملگر دیفرانسیل مرتبه دوم، عملگر لاپلاس توابع Ck را به توابع Ck - 2 برای k ≥ 2 نگاشت می کند . این یک عملگر خطی : C k ( R n ) → C k −2 ( R n ) یا به طور کلی، یک عملگر : C k (Ω) → C k −2 (Ω) برای هر مجموعه باز Ω است. R n _
انگیزه [ ویرایش ]
انتشار [ ویرایش ]
در تئوری فیزیکی انتشار ، عملگر لاپلاس به طور طبیعی در توصیف ریاضی تعادل به وجود می آید . [1] به طور خاص، اگر u چگالی در تعادل مقداری مانند غلظت شیمیایی باشد، شار خالص u از مرز ∂ V هر ناحیه صاف V صفر است، مشروط بر اینکه هیچ منبع یا فرورفتگی در V وجود نداشته باشد :

که در آن n واحد بیرونی نرمال با مرز V است . با قضیه واگرایی ،

از آنجایی که این برای همه مناطق صاف V صادق است ، می توان نشان داد که به این معنی است:
 سمت چپ این معادله عملگر لاپلاس است و کل معادله u = 0 به عنوان معادله لاپلاس شناخته می شود . راه حل های معادله لاپلاس، یعنی توابعی که لاپلاسین آنها یکسان صفر است، بنابراین چگالی های تعادلی ممکن را تحت نفوذ نشان می دهند.
سمت چپ این معادله عملگر لاپلاس است و کل معادله u = 0 به عنوان معادله لاپلاس شناخته می شود . راه حل های معادله لاپلاس، یعنی توابعی که لاپلاسین آنها یکسان صفر است، بنابراین چگالی های تعادلی ممکن را تحت نفوذ نشان می دهند.
عملگر لاپلاس خود یک تفسیر فیزیکی برای انتشار غیرتعادلی دارد به عنوان میزانی که یک نقطه نشان دهنده منبع یا سینک غلظت شیمیایی است، به معنایی که معادله انتشار دقیق است . این تفسیر از لاپلاسی نیز با حقیقیت زیر در مورد میانگین ها توضیح داده می شود.
میانگین ها [ ویرایش ]
با توجه به یک تابع دو بار متمایز پیوسته: و یک نکته
و یک نکته  . سپس، مقدار متوسط ازبالای توپ با شعاع
. سپس، مقدار متوسط ازبالای توپ با شعاع  متمرکز در
متمرکز در است: [2]
است: [2]

به طور مشابه، مقدار متوسط ازبر روی کره (مرز یک توپ) با شعاع متمرکز دراست:

چگالی مرتبط با پتانسیل [ ویرایش ]
اگر φ نشان دهنده پتانسیل الکترواستاتیک مرتبط با توزیع بار q باشد، خود توزیع بار توسط منفی لاپلاسین φ بدست می آید :

جایی که ε 0 ثابت الکتریکی است .
این نتیجه قانون گاوس است . در واقع، اگر V هر ناحیه صاف با مرز ∂ V باشد ، طبق قانون گاوس، شار میدان الکترواستاتیک E در سراسر مرز با بار محصور شده متناسب است:

که در آن برابری اول ناشی از قضیه واگرایی است . از آنجایی که میدان الکترواستاتیک شیب (منفی) پتانسیل است، این نشان می دهد:

از آنجایی که این برای همه مناطق V صادق است ، باید داشته باشیم

همین رویکرد نشان می دهد که منفی لاپلاسین پتانسیل گرانشی توزیع جرم است . اغلب توزیع بار (یا جرم) داده می شود و پتانسیل مرتبط ناشناخته است. یافتن تابع پتانسیل تحت شرایط مرزی مناسب معادل حل معادله پواسون است .
به حداقل رساندن انرژی [ ویرایش ]
انگیزه دیگر برای ظاهر شدن لاپلاسین در فیزیک این است که راه حل های f = 0 در ناحیه U توابعی هستند که انرژی دیریکله را ثابت می کنند :

برای مشاهده این، فرض کنید f : U → R یک تابع است و u : U → R تابعی است که در مرز U ناپدید می شود . سپس:

که در آن آخرین برابری با استفاده از اولین اتحاد گرین دنبال می شود . این محاسبه نشان می دهد که اگر f = 0 باشد ، E در اطراف f ثابت است . برعکس، اگر E حول f ثابت باشد ، آنگاه f = 0 توسط لم اساسی حساب تغییرات .
عبارات مختصات [ ویرایش ]
دو بعدی [ ویرایش ]
عملگر لاپلاس در دو بعد توسط:
در مختصات دکارتی ،
 که در آن x و y مختصات دکارتی استاندارد صفحه xy هستند .
که در آن x و y مختصات دکارتی استاندارد صفحه xy هستند .
در مختصات قطبی ،

که r نشان دهنده فاصله شعاع ی و θ زاویه است.
سه بعدی [ ویرایش ]
همچنین ببینید: دل در مختصات استوانه ای و کروی
در سه بعد، کار با لاپلاسین در انواع سیستم های مختصات مختلف رایج است.
در مختصات دکارتی ،

در مختصات استوانه ای ،

جایی که نشان دهنده فاصله شعاع ی، φ زاویه آزیموت و z ارتفاع است.
نشان دهنده فاصله شعاع ی، φ زاویه آزیموت و z ارتفاع است.
در مختصات کروی :
 یا
یا

با گسترش عبارت اول، این عبارات خوانده می شوند

که در آن φ نشان دهنده زاویه ازیموتال و θ زاویه اوج یا هم عرض جغرافیایی است .
به طور کلی مختصات منحنی ( ξ 1 , ξ 2 , ξ 3 ):

جایی که جمع بر روی شاخص های مکرر دلالت دارد ، g mn تانسور معکوس متریک و Γl mn نمادهای کریستوفل برای مختصات انتخاب شده هستند .
ابعاد N [ ویرایش ]
در مختصات منحنی دلخواه در ابعاد N ( ξ 1 ، ...، ξN )، میتوانیم لاپلاسین را بر حسب تانسور متریک معکوس بنویسیم . :
:
 از فرمول ووس-ویل [3] برای واگرایی .
از فرمول ووس-ویل [3] برای واگرایی .
در مختصات کروی در ابعاد N ، با پارامترسازی x = rθ ∈ R N با r نشان دهنده یک شعاع حقیقی مثبت و θ عنصری از کره واحد S N -1 ،

که در آن S N -1 عملگر لاپلاس-بلترامی روی ( N -1) -کره است که به عنوان لاپلاسین کروی شناخته می شود. دو عبارت مشتق شعاع ی را می توان به طور معادل به صورت زیر بازنویسی کرد:

در نتیجه، لاپلاسین کروی تابعی که بر روی SN - 1 ⊂ RN تعریف شده است را می توان به عنوان لاپلاسی معمولی تابعی که به RN ∖ {0} گسترش یافته محاسبه کرد تا در طول پرتوها ثابت باشد، یعنی درجه همگن باشد . صفر
تغییر ناپذیری اقلیدسی [ ویرایش ]
لاپلاسی تحت تمام دگرگونی های اقلیدسی ثابت است : چرخش ها و ترجمه ها . به عنوان مثال، در دو بعد، به این معنی است که:

برای همه θ , a , و b . در ابعاد دلخواه،
 هر گاه ρ یک چرخش باشد و به همین ترتیب:
هر گاه ρ یک چرخش باشد و به همین ترتیب:
 هر زمان که τ ترجمه باشد. (به طور کلی، زمانی که ρ یک تبدیل متعامد مانند بازتاب است، این موضوع صادق است .)
هر زمان که τ ترجمه باشد. (به طور کلی، زمانی که ρ یک تبدیل متعامد مانند بازتاب است، این موضوع صادق است .)
در واقع، جبر همه عملگرهای دیفرانسیل خطی اسکالر، با ضرایب ثابت، که با همه تبدیلهای اقلیدسی جابهجا میشوند، جبر چند جملهای است که توسط عملگر لاپلاس ایجاد میشود.
نظریه طیفی [ ویرایش ]
همچنین ببینید: شنیدن شکل یک درام و مقدار ویژه دیریکله
طیف عملگر لاپلاس از تمام مقادیر ویژه λ تشکیل شده است که برای آنها یک تابع ویژه f با عبارت زیر وجود دارد :

این معادله به عنوان معادله هلمهولتز شناخته می شود .
اگر Ω یک دامنه محدود در R n باشد ، آنگاه توابع ویژه لاپلاسین یک مبنای متعارف برای فضای هیلبرت L 2 (Ω) هستند . این نتیجه اساساً از قضیه طیفی بر روی عملگرهای فشرده خود الحاقی که به معکوس لاپلاسین (که فشرده است، توسط نابرابری پوانکاره و قضیه رلیش-کوندراخوف ) اعمال میشود. [4] همچنین می توان نشان داد که توابع ویژه، توابع بی نهایت قابل تمایز هستند . [5] به طور کلی، این نتایج برای عملگر لاپلاس-بلترامی در هر منیفولد فشرده ریمانی با مرز، یا در واقع برای مسئله مقدار ویژه دیریکله هر عملگر بیضی با ضرایب صاف در یک دامنه محدود، صادق است. وقتی Ω n- کره باشد ، توابع ویژه لاپلاسین هارمونیک های کروی هستند .
لاپلاسی بردار [ ویرایش ]
بردار عملگر لاپلاس که با نشان داده می شود2، یک عملگر دیفرانسیل است که روی یک میدان برداری تعریف شده است . [6] لاپلاس بردار شبیه لاپلاسین اسکالر است. در حالی که لاپلاسین اسکالر به یک میدان اسکالر اعمال می شود و یک کمیت اسکالر را برمی گرداند، بردار لاپلاسی برای یک میدان برداری اعمال می شود و یک کمیت برداری را برمی گرداند. هنگامی که در مختصات دکارتی متعامد محاسبه می شود ، میدان برداری برگشتی برابر با میدان برداری لاپلاسین اسکالر اعمال شده برای هر جزء برداری است.
لاپلاسین بردار یک میدان برداری آ به عنوان ... تعریف شده است
به عنوان ... تعریف شده است

در مختصات دکارتی ، این به شکل بسیار سادهتر کاهش مییابد

جایی که  ،
، ، و
، و اجزای میدان برداری هستند، وفقط در سمت چپ هر جزء بردار عملگر لاپلاس (اسکالار) قرار دارد. می توان مشاهده کرد که این مورد خاصی از فرمول لاگرانژ است. ضرب سه گانه برداری را ببینید .
اجزای میدان برداری هستند، وفقط در سمت چپ هر جزء بردار عملگر لاپلاس (اسکالار) قرار دارد. می توان مشاهده کرد که این مورد خاصی از فرمول لاگرانژ است. ضرب سه گانه برداری را ببینید .
برای بیان لاپلاس بردار در سایر سیستم های مختصات به دل در مختصات استوانه ای و کروی مراجعه کنید .
تعمیم [ ویرایش ]
لاپلاسین هر میدان تانسوری  ("تانسور " شامل اسکالر و برداری است) به عنوان واگرایی گرادیان تانسور تعریف می شود :
("تانسور " شامل اسکالر و برداری است) به عنوان واگرایی گرادیان تانسور تعریف می شود :

برای مورد خاص کهیک اسکالر (تانسور درجه صفر) است، لاپلاسی شکل آشنا به خود می گیرد.
اگریک بردار است (تانسور درجه اول)، گرادیان یک مشتق کوواریانت است که منجر به یک تانسور درجه دوم می شود و واگرایی این دوباره یک بردار است. فرمول بردار لاپلاسی بالا ممکن است برای جلوگیری از ریاضیات تانسور استفاده شود و ممکن است معادل واگرایی ماتریس ژاکوبین نشان داده شده در زیر برای گرادیان یک بردار باشد:

و به همین ترتیب، حاصلضرب نقطهای که بردار را با گرادیان بردار دیگر (تانسور درجه 2) به بردار ارزیابی میکند، میتواند بهعنوان حاصلضرب ماتریسها دیده شود:

این اتحاد یک نتیجه وابسته به مختصات است و کلی نیست.
استفاده در فیزیک [ ویرایش ]
نمونه ای از استفاده از بردار لاپلاسی معادلات ناویر-استوکس برای یک جریان تراکم ناپذیر نیوتنی است :
 که در آن عبارت با بردار لاپلاسی میدان سرعت است
که در آن عبارت با بردار لاپلاسی میدان سرعت است نشان دهنده تنش های چسبناک در سیال است.
نشان دهنده تنش های چسبناک در سیال است.
مثال دیگر معادله موج میدان الکتریکی است که می توان از معادلات ماکسول در غیاب بار و جریان بدست آورد:

این معادله را می توان به صورت زیر نیز نوشت:
 جایی که
جایی که
 دلامبرتی است که در معادله کلاین-گوردون استفاده می شود .
دلامبرتی است که در معادله کلاین-گوردون استفاده می شود .
کلیات [ ویرایش ]
هر جا که عملکرد انرژی دیریکله معنا داشته باشد ، می توان نسخه ای از لاپلاسی را تعریف کرد ، که نظریه اشکال دیریکله است . برای فضاهایی با ساختار اضافی، می توان توضیحات واضح تری از لاپلاسین به شرح زیر ارائه داد.
اپراتور لاپلاس–بلترامی [ ویرایش ]
مقاله اصلی: اپراتور لاپلاس–بلترامی
لاپلاسین همچنین می تواند به یک عملگر بیضوی به نام عملگر لاپلاس-بلترامی تعمیم داده شود که در منیفولد ریمانی تعریف شده است . عملگر لاپلاس-بلترامی، زمانی که به یک تابع اعمال می شود، رد ( tr ) هسین تابع است :

جایی که ردیابی با توجه به معکوس تانسور متریک گرفته می شود . عملگر لاپلاس-بلترامی را نیز می توان به یک عملگر (که عملگر لاپلاس-بلترامی نیز نامیده می شود) تعمیم داد که بر روی میدان های تانسوری عمل می کند ، با یک فرمول مشابه.
تعمیم دیگری از عملگر لاپلاس که در منیفولدهای شبه ریمانی موجود است از مشتق بیرونی استفاده می کند که بر حسب آن "لاپلاسی هندسه" به صورت بیان می شود.

در اینجا کد دیفرانسیل است که می تواند بر حسب ستاره هاج و مشتق بیرونی نیز بیان شود. این عملگر از نظر علامت با "لاپلاسی تحلیلگر" تعریف شده در بالا متفاوت است. به طور کلی، لاپلاسین "Hodge" بر روی اشکال دیفرانسیل α توسط تعریف می شود

این عملگر به عنوان عملگر لاپلاس-د رام شناخته میشود ، که با اتحاد Weitzenböck به عملگر لاپلاس-بلترامی مرتبط است .
دلامبرتی [ ویرایش ]
لاپلاسی را می توان به طرق خاصی به فضاهای غیر اقلیدسی تعمیم داد، جایی که ممکن است بیضوی ، هذلولی یا فوق هایپربولیک باشد .
در فضای مینکوفسکی عملگر لاپلاس -بلترامی به عملگر دالامبر تبدیل میشود ◻ یا دالامبرتین:
یا دالامبرتین:

این تعمیم عملگر لاپلاس است به این معنا که عملگر دیفرانسیل است که تحت گروه ایزومتری فضای زیرین ثابت است و اگر به توابع مستقل از زمان محدود شود به عملگر لاپلاس کاهش می یابد. علامت کلی متریک در اینجا به گونهای انتخاب میشود که بخشهای فضایی عملگر یک علامت منفی را بپذیرد، که قرارداد معمول در فیزیک ذرات پرانرژی است . عملگر دالامبر به عنوان عملگر موج نیز شناخته می شود زیرا عملگر دیفرانسیل است که در معادلات موج ظاهر می شود و همچنین بخشی از معادله کلاین-گوردون است که در حالت بدون جرم به معادله موج کاهش می یابد.
ضریب اضافی c در متریک در فیزیک مورد نیاز است اگر فضا و زمان در واحدهای مختلف اندازه گیری شود. برای مثال، اگر جهت x بر حسب متر و جهت y بر حسب سانتی متر اندازه گیری شود، فاکتور مشابهی لازم است . در واقع، فیزیکدانان نظری معمولاً در واحدهایی کار می کنند که c =1 باشد تا معادله را ساده کنند.
عملگر دی المبرت به یک عملگر هذلولی در منیفولدهای شبه ریمانی تعمیم می دهد .
همچنین ببینید [ ویرایش ]
- عملگر لاپلاس-بلترامی ، تعمیم به زیرمنیفولدها در فضای اقلیدسی و منیفولد ریمانی و شبه ریمانی.
- عملگر لاپلاسی بردار ، تعمیم میدانهای لاپلاسی به برداری .
- لاپلاسی در هندسه دیفرانسیل .
- عملگر لاپلاس گسسته یک آنالوگ تفاضل محدود از لاپلاسین پیوسته است که بر روی نمودارها و شبکه ها تعریف شده است.
- لاپلاسین یک اپراتور رایج در پردازش تصویر و بینایی کامپیوتری است (به لاپلاسین گاوسی ، آشکارساز حباب و فضای مقیاس مراجعه کنید ).
- فهرست فرمول ها در هندسه ریمانی شامل عباراتی برای لاپلاسی بر حسب نمادهای کریستوفل است.
- لم ویل (معادله لاپلاس) .
- قضیه ارنشاو که نشان می دهد تعلیق گرانشی، الکترواستاتیکی یا مغناطیسی پایدار غیرممکن است.
- دل در مختصات استوانه ای و کروی .
- موقعیت های دیگری که در آنها یک لاپلاسی تعریف می شود عبارتند از: تجزیه و تحلیل بر روی فراکتال ها ، حساب مقیاس زمانی و حساب خارجی گسسته .
یادداشت ها [ ویرایش ]
- ^ ایوانز 1998 ، §2.2
- ↑ Oval, Jeffrey S. (01-03-2016). "لاپلاسی و ارزش های متوسط و افراطی" (PDF) . ماهنامه ریاضی آمریکا . 123 (3): 287-291. doi : 10.4169/amer.math.monthly.123.3.287 . S2CID 124943537 .
- ↑ بایگانی شده در Ghostarchive and the Wayback Machine : Grinfeld, Pavel. "فرمول Voss-Weyl" . یوتیوب . بازیابی شده در 9 ژانویه 2018 .
- ↑ گیلبارگ و ترودینگر 2001 ، قضیه 8.6
- ↑ گیلبارگ و ترودینگر 2001 ، نتیجه 8.11
- ^ دنیای ریاضی. " لاپلاس بردار " .
منابع [ ویرایش ]
- ایوانز، ال. (1998)، معادلات دیفرانسیل جزئی ، انجمن ریاضی آمریکا، شابک 978-0-8218-0772-9
- سخنرانی های فاینمن در فیزیک جلد. فصل دوم 12: آنالوگ های الکترواستاتیک
- گیلبارگ، دی. ترودینگر، ن. (2001)، معادلات دیفرانسیل جزئی بیضوی مرتبه دوم ، اسپرینگر، شابک 978-3-540-41160-4.
- Schey, HM (1996), Div, Grad, Curl, and All That , WW Norton, ISBN 978-0-393-96997-9.
ادامه مطلب [ ویرایش ]
- لاپلاسیان - ریچارد فیتزپاتریک 2006
پیوندهای خارجی [ ویرایش ]
- "اپراتور لاپلاس" ، دایره المعارف ریاضیات ، انتشارات EMS ، 2001 [1994]
- وایستاین، اریک دبلیو. "لاپلاسین" . دنیای ریاضی .
- لاپلاسین در اشتقاق مختصات قطبی
- معادلات مکعب فراکتال و اثر کازیمیر
https://en.wikipedia.org/wiki/Laplace_operator






























![{\displaystyle \mathbf {a} \cdot [\mathbf {b} \times \mathbf {c} ]=\varepsilon _{ijk}a^{i}b^{j}c^{k}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1f5abca130937a2012b0f42bf0a587074f8f08d6)
![{\displaystyle (\mathbf {a} \times [\mathbf {b} \times \mathbf {c} ])_{i}=\varepsilon _{ijk}a^{j}\varepsilon ^{k\ell m }b_{\ell }c_{m}=\varepsilon _{ijk}\varepsilon ^{k\ell m}a^{j}b_{\ell }c_{m},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d4b9001d4ed44c60bef2063869e9f9f04f79a66f)














![{\displaystyle (\mathbf {a} \times [\mathbf {b} \times \mathbf {c} ])_{i}=(\delta _{i}^{\ell }\delta _{j}^ {m}-\delta _{i}^{m}\delta _{j}^{\ell })a^{j}b_{\ell }c_{m}=a^{j}b_{i} c_{j}-a^{j}b_{j}c_{i}=b_{i}(\mathbf {a} \cdot \mathbf {c} )-c_{i}(\mathbf {a} \cdot \mathbf {b} )\,.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bf362b74fdd08b44a8d0da1a117b4cad3d07b7b9)








 محدود به نابرابری های زیر است:
محدود به نابرابری های زیر است:


 .
.
 را تعیین کنیم. اگر
را تعیین کنیم. اگر


![{\displaystyle {\begin{aligned}I&=\iiint _{V}\nabla \cdot \mathbf {F} \,\mathrm {d} V\\[6pt]&=\iiint _{V}\left( {\frac {\partial \mathbf {F_{x}} }{\partial x}}+{\frac {\partial \mathbf {F_{y}} }{\partial y}}+{\frac {\partial \mathbf {F_{z}} }{\partial z}}\right)\mathrm {d} V\\[6pt]&=\iiint _{V}(4x+4y+4z)\,\mathrm {d } V\\[6pt]&=\int _{0}^{3}\int _{-2}^{2}\int _{0}^{2\pi }(4x+4y+4z)\ ,\mathrm {d} V\end{تراز شده}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d474d797d9611bde7396b5ad3c477fc3954e40fb)
![{\displaystyle {\begin{aligned}\int _{0}^{3}\int _{-2}^{2}\int _{0}^{2\pi }(4x+4y+4z)\ ,\mathrm {d} V&=\int _{-2}^{2}\int _{0}^{2\pi }(12y+12z+18)\,\mathrm {d} y\,\mathrm {d} z\\[6pt]&=\int _{0}^{2\pi }24(2z+3)\,\mathrm {d} z\\[6pt]&=48\pi (2\ pi +3)\end{تراز شده}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/620b3ddd2e22372f036668159bdb83c2be45446e)
![{\displaystyle L=\int _{a}^{b}{\sqrt {\left[r(\varphi )\right]^{2}+\left[{\tfrac {dr(\varphi )}{d \varphi }}\right]^{2}}}d\varphi }](https://wikimedia.org/api/rest_v1/media/math/render/svg/34f62c06ac2868b9ac160abe1e75a075cad9e261)

![{\displaystyle {\frac {1}{2}}\int _{a}^{b}\left[r(\varphi )\right]^{2}\,d\varphi .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9fc7958a00360514f36fabcac7cab0361c2ae068)


![{\displaystyle \left[r(\varphi _{i})\right]^{2}\pi \cdot {\frac {\Delta \varphi }{2\pi }}={\frac {1}{2 }}\left[r(\varphi _{i})\right]^{2}\Delta \varphi .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ec0cb32735f6a73076e1db62726c0eace3f000f6)

![{\displaystyle J=\det {\frac {\partial (x,y)}{\partial (r,\varphi )}}={\begin{vmatrix}{\frac {\partial x}{\partial r} }&{\frac {\partial x}{\partial \varphi }}\\[2pt]{\frac {\partial y}{\partial r}}&{\frac {\partial y}{\partial \varphi }}\end{vmatrix}}={\begin{vmatrix}\cos \varphi &-r\sin \varphi \\\sin \varphi &r\cos \varphi \end{vmatrix}}=r\cos ^{2 }\varphi +r\sin ^{2}\varphi =r.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/52a1293fcb0e90b77017c0d9176c62aa06615b9b)


.svg)
 و ناحیه بین تابع و
و ناحیه بین تابع و .
.
 بردار موقعیت ( r cos( φ )، r sin( φ )) باشد ، با r و φ بسته به زمان t .
بردار موقعیت ( r cos( φ )، r sin( φ )) باشد ، با r و φ بسته به زمان t . در مسیر
در مسیر
 یک بردار واحد نرمال با صفحه حرکت است.
یک بردار واحد نرمال با صفحه حرکت است.



 گاهی اوقات به عنوان شتاب مرکزگرا و اصطلاح شناخته می شود
گاهی اوقات به عنوان شتاب مرکزگرا و اصطلاح شناخته می شود به عنوان شتاب کوریولیس . برای مثال به شانکار مراجعه کنید.
به عنوان شتاب کوریولیس . برای مثال به شانکار مراجعه کنید. 




 و شعاع a است
و شعاع a است
 برای دایره ای با مرکز در قطب و شعاع a .
برای دایره ای با مرکز در قطب و شعاع a . 

 جایی که
جایی که زاویه ارتفاع خط است. به این معنا که،
زاویه ارتفاع خط است. به این معنا که، ، جایی که
، جایی که



.svg)





 ،
، ،
، یا
یا به یک هویت هذلولی، با بسط کامل آن بر حسب قدرت های انتگرال سینوس ها و کسینوس ها، تغییر سینوس به سینه و کسینوس به کوش، و تغییر علامت هر عبارت حاوی حاصل ضرب دو سین.
به یک هویت هذلولی، با بسط کامل آن بر حسب قدرت های انتگرال سینوس ها و کسینوس ها، تغییر سینوس به سینه و کسینوس به کوش، و تغییر علامت هر عبارت حاوی حاصل ضرب دو سین.




![{\displaystyle {\begin{aligned}\sinh(x+y)&=\sinh x\cosh y+\cosh x\sinh y\\\cosh(x+y)&=\cosh x\cosh y+\sinh x \sinh y\\[6px]\tanh(x+y)&={\frac {\tanh x+\tanh y}{1+\tanh x\tanh y}}\\\end{تراز شده}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8a343fcb86c5fa15cceb217f4e92410c70a6e200)




![{\displaystyle {\begin{aligned}\sinh \left({\frac {x}{2}}\right)&={\frac {\sinh x}{\sqrt {2(\cosh x+1)} }}&&=\operatorname {sgn} x\,{\sqrt {\frac {\cosh x-1}{2}}}\\[6px]\cosh \left({\frac {x}{2}} \right)&={\sqrt {\frac {\cosh x+1}{2}}}\\[6px]\tanh \left({\frac {x}{2}}\right)&={\ frac {\sinh x}{\cosh x+1}}&&=\operatorname {sgn} x\,{\sqrt {\frac {\cosh x-1}{\cosh x+1}}}={\frac {e^{x}-1}{e^{x}+1}}\end{تراز شده}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/412a4ffd109486f684e515634b33447b13444954)















 با شرایط اولیه
با شرایط اولیه جلوگیری از هر جفت عملکرد{
جلوگیری از هر جفت عملکرد{ راه حل باشد
راه حل باشد






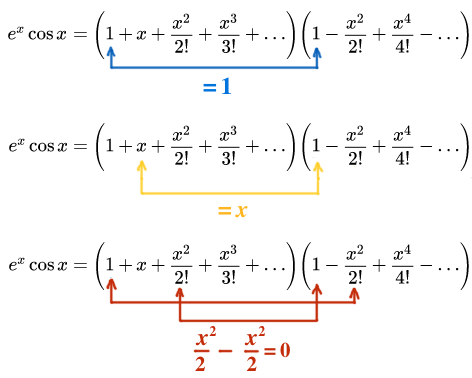
 . شما بسط را بدست می آورید:
. شما بسط را بدست می آورید:



 ،
، .
.
 .
.






 می توان با مقایسه ضرایب با عبارت بالا برای یافت
می توان با مقایسه ضرایب با عبارت بالا برای یافت ، بازده:
، بازده:



 که به دو متغیر
که به دو متغیر 




![{\displaystyle {\begin{aligned}f_{x}&=e^{x}\ln(1+y)\\[6pt]f_{y}&={\frac {e^{x}}{1 +y}}\\[6pt]f_{xx}&=e^{x}\ln(1+y)\\[6pt]f_{yy}&=-{\frac {e^{x}}{ (1+y)^{2}}}\\[6pt]f_{xy}&=f_{yx}={\frac {e^{x}}{1+y}}.\end{تراز شده}} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/80a9f65e179df2db5256dc15097892be2ded7c6d)








![{\displaystyle f(x)={\begin{cases}e^{-1/x^{2}}&{\text{if }}x\neq 0\\[3mu]0&{\text{if } }x=0\end{موارد}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ae050e61cde6a0fdeda1f237f75846465579462d)





 .
.
 . (علاوه بر این، سری برای
. (علاوه بر این، سری برای 



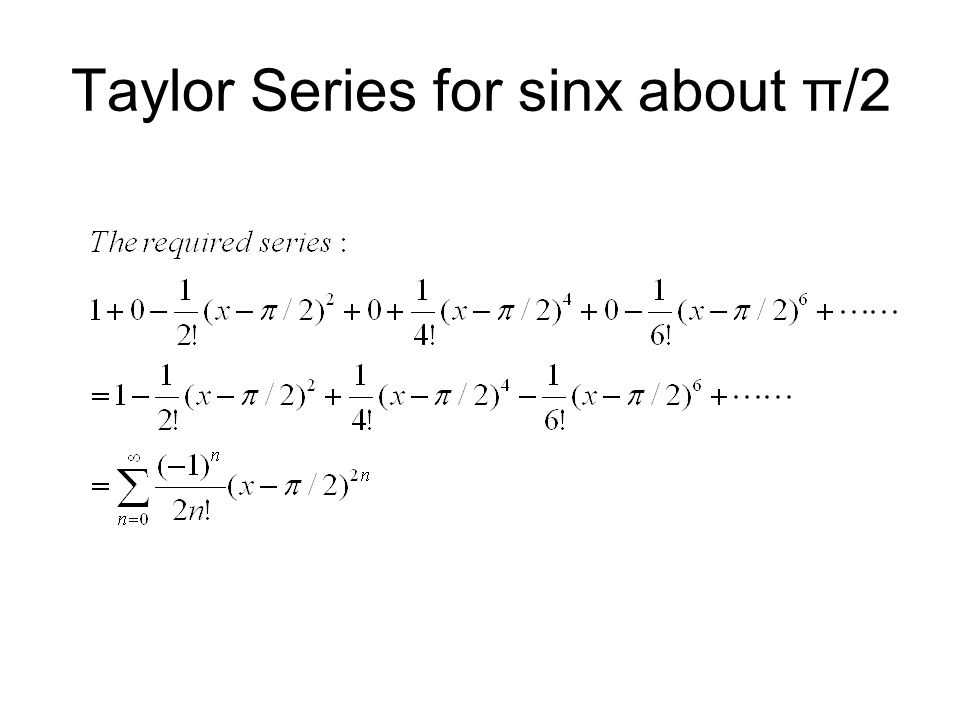
![{\displaystyle {\begin{aligned}\sin x&=\sum _{n=0}^{\infty }{\frac {(-1)^{n}}{(2n+1)!}}x^ {2n+1}&&=x-{\frac {x^{3}}{3!}}+{\frac {x^{5}}{5!}}-\cdots &&{\text{برای همه }}x\\[6pt]\cos x&=\sum _{n=0}^{\infty }{\frac {(-1)^{n}}{(2n)!}}x^{2n} &&=1-{\frac {x^{2}}{2!}}+{\frac {x^{4}}{4!}}-\cdots &&{\text{برای همه }}x\\ [6pt]\tan x&=\sum _{n=1}^{\infty }{\frac {B_{2n}(-4)^{n}\left(1-4^{n}\right)} {(2n)!}}x^{2n-1}&&=x+{\frac {x^{3}}{3}}+{\frac {2x^{5}}{15}}+\cdots && {\text{for }}|x|<{\frac {\pi }{2}}\\[6pt]\sec x&=\sum _{n=0}^{\infty }{\frac {(- 1)^{n}E_{2n}}{(2n)!}}x^{2n}&&=1+{\frac {x^{2}}{2}}+{\frac {5x^{4 }}{24}}+\cdots &&{\text{for }}|x|<{\frac {\pi }{2}}\\[6pt]\arcsin x&=\sum _{n=0}^ {\infty }{\frac {(2n)!}{4^{n}(n!)^{2}(2n+1)}}x^{2n+1}&&=x+{\frac {x^{3}}{6}}+{\frac {3x^{5}}{40}}+\cdots &&{\text{برای }}|x|\leq 1\\ [6pt]\arccos x&={\frac {\pi }{2}}-\arcsin x\\&={\frac {\pi }{2}}-\sum _{n=0}^{\infty }{\frac {(2n)!}{4^{n}(n!)^{2}(2n+1)}}x^{2n+1}&&={\frac {\pi }{2} }-x-{\frac {x^{3}}{6}}-{\frac {3x^{5}}{40}}-\cdots &&{\text{برای }}|x|\leq 1 \\[6pt]\arctan x&=\sum _{n=0}^{\infty }{\frac {(-1)^{n}}{2n+1}}x^{2n+1}&&= x-{\frac {x^{3}}{3}}+{\frac {x^{5}}{5}}-\cdots &&{\text{for }}|x|\leq 1,\ x\neq \pm i\end{تراز شده}}}=\sum _{n=0}^{\infty }{\frac {(-1)^{n}}{2n+1}}x^{2n+1}&&=x-{\frac {x^ {3}}{3}}+{\frac {x^{5}}{5}}-\cdots &&{\text{for }}|x|\leq 1,\ x\neq \pm i\end {هم راستا}}}=\sum _{n=0}^{\infty }{\frac {(-1)^{n}}{2n+1}}x^{2n+1}&&=x-{\frac {x^ {3}}{3}}+{\frac {x^{5}}{5}}-\cdots &&{\text{for }}|x|\leq 1,\ x\neq \pm i\end {هم راستا}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/158a0ae14d1c9e0d1dc21c268f7e2169b9066dc7)
![{\displaystyle {\begin{aligned}\sinh x&=\sum _{n=0}^{\infty }{\frac {x^{2n+1}}{(2n+1)!}}&&=x+ {\frac {x^{3}}{3!}}+{\frac {x^{5}}{5!}}+\cdots &&{\text{برای همه }}x\\[6pt]\ cosh x&=\sum _{n=0}^{\infty }{\frac {x^{2n}}{(2n)!}}&&=1+{\frac {x^{2}}{2! }}+{\frac {x^{4}}{4!}}+\cdots &&{\text{برای همه }}x\\[6pt]\tanh x&=\sum _{n=1}^{ \infty }{\frac {B_{2n}4^{n}\left(4^{n}-1\right)}{(2n)!}}x^{2n-1}&&=x-{\ frac {x^{3}}{3}}+{\frac {2x^{5}}{15}}-{\frac {17x^{7}}{315}}+\cdots &&{\text{ برای }}|x|<{\frac {\pi }{2}}\\[6pt]\operatorname {arsinh} x&=\sum _{n=0}^{\infty }{\frac {(-1) )^{n}(2n)!}{4^{n}(n!)^{2}(2n+1)}}x^{2n+1}&&=x-{\frac {x^{3 }}{6}}+{\frac {3x^{5}}{40}}-\cdots &&{\text{for }}|x|\leq 1\\[6pt]\operatorname {artanh} x&= \sum _{n=0}^{\infty }{\frac {x^{2n+1}}{2n+1}}&&=x+{\frac {x^{3}}{3}}+{\frac {x^{5}}{5}}+\cdots &&{\text{برای }}|x|\leq 1,\ x\neq \pm 1\end{تراز شده}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cda808c97562eca785bd172eb7739711b338730a)





![{\displaystyle {\begin{aligned}\nabla f={}&{\partial f \over \partial r}{\hat {\mathbf {r} }}+{1 \over r}{\partial f \over \partial \theta }{\hat {\boldsymbol {\theta }}}+{1 \over r\sin \theta }{\partial f \over \partial \varphi }{\hat {\boldsymbol {\varphi }}},\\[8pt]\nabla \cdot \mathbf {A} ={}&{\frac {1}{r^{2}}}{\partial \over \partial r}\left(r^{2}A_{r}\right)+{\frac {1}{r\sin \theta }}{\partial \over \partial \theta }\left(\sin \theta A_{\theta }\right)+{\frac {1}{r\sin \theta }}{\partial A_{\varphi } \over \partial \varphi },\\[8pt]\nabla \times \mathbf {A} ={}&{\frac {1}{r\sin \theta }}\left({\partial \over \partial \theta }\left(A_{\varphi }\sin \theta \right)-{\partial A_{\theta } \over \partial \varphi }\right){\hat {\mathbf {r} }}\\[8pt]&{}+{\frac {1}{r}}\left({1 \over \sin \theta }{\partial A_{r} \over \partial \varphi }-{\partial \over \partial r}\left(rA_{\varphi }\right)\right){\hat {\boldsymbol {\theta }}}\\[8pt]&{}+{\frac {1}{r}}\left({\partial \over \partial r}\left(rA_{\theta }\right)-{\partial A_{r} \over \partial \theta }\right){\hat {\boldsymbol {\varphi }}},\\[8pt]\nabla ^{2}f={}&{1 \over r^{2}}{\partial \over \partial r}\left(r^{2}{\partial f \over \partial r}\right)+{1 \over r^{2}\sin \theta }{\partial \over \partial \theta }\left(\sin \theta {\partial f \over \partial \theta }\right)+{1 \over r^{2}\sin ^{2}\theta }{\partial ^{2}f \over \partial \varphi ^{2}}\\[8pt]={}&\left({\frac {\partial ^{2}}{\partial r^{2}}}+{\frac {2}{r}}{\frac {\partial }{\partial r}}\right)f+{1 \over r^{2}\sin \theta }{\partial \over \partial \theta }\left(\sin \theta {\frac {\partial }{\partial \theta }}\right)f+{\frac {1}{r^{2}\sin ^{2}\theta }}{\frac {\partial ^{2}}{\partial \varphi ^{2}}}f~.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/175f5c757bb3e3aadcdd97cfd4c7953fa98379e3)




 .
.























 نشان دادن فاصله شعاعی، شیب (یا ارتفاع) و آزیموت، به ترتیب، یک روش معمول در فیزیک است و توسط استاندارد
نشان دادن فاصله شعاعی، شیب (یا ارتفاع) و آزیموت، به ترتیب، یک روش معمول در فیزیک است و توسط استاندارد  برابر است با
برابر است با برابر است با
برابر است با .
.


 یا
یا

 . با توجه به
. با توجه به 
 در این وبلاگ به ریاضیات و کاربردهای آن و تحقیقات در آنها پرداخته می شود. مطالب در این وبلاگ ترجمه سطحی و اولیه است و کامل نیست.در صورتی سوال یا نظری در زمینه ریاضیات دارید مطرح نمایید .در صورت امکان به آن می پردازم. من دوست دارم برای یافتن پاسخ به سوالات و حل پروژه های علمی با دیگران همکاری نمایم.در صورتی که شما هم بامن هم عقیده هستید با من تماس بگیرید.
در این وبلاگ به ریاضیات و کاربردهای آن و تحقیقات در آنها پرداخته می شود. مطالب در این وبلاگ ترجمه سطحی و اولیه است و کامل نیست.در صورتی سوال یا نظری در زمینه ریاضیات دارید مطرح نمایید .در صورت امکان به آن می پردازم. من دوست دارم برای یافتن پاسخ به سوالات و حل پروژه های علمی با دیگران همکاری نمایم.در صورتی که شما هم بامن هم عقیده هستید با من تماس بگیرید.