توسط علی رضا نقش نیلچی
| سه شنبه سی ام بهمن ۱۳۹۷ | 9:27
این مقاله در مورد شعبه ریاضیات است. برای استفاده های دیگر، نگاه کنید به توپولوژی (ابهامزدایی) .

نوار موبیوس که فقط یک سطح و یک لبه دارد، نوعی از جسم مورد مطالعه در توپولوژی است.
در ریاضیات ، توپولوژی (از یونانی τόπος، جای ، و λόγος، مطالعه ) با خواص مربوط فضای که تحت حفظ مداوم تغییر شکل ، مانند کشش ، چرخاندن، از crumpling و خم شدن، اما نه پاره و یا چسب .
n بعدی فضای توپولوژیک یک فضای (نه لزوما است اقلیدسی ) با ویژگیهای خاص از ارتباط و فشردگی . [1]
فضای ممکن است مستمر باشد (مانند همه نقاط روی یک ورق لاستیکی)، یا گسسته (مانند مجموعه ای از عدد صحیح ). این می تواند باز باشد (مانند مجموعه ای از نقاط در داخل یک دایره ) یا بسته (مانند مجموعه ای از نقاط در داخل یک دایره، همراه با نقاط در دایره).
توپولوژی به وسیله تجزیه و تحلیل مفاهیم مانند فضا، ابعاد و تحول به عنوان زمینه تحصیلی از هندسه و تئوری مجموعه ایجاد شده است .[2] چنین ایده هایی به گاتفریید لایبنیتس بازمی گردد که در قرن 17 میلادی هندسه هندسی (یونانی-لاتین به عنوان "هندسه مکان") وتجزیه و تحلیل موضع (یونانی-لاتین برای "برداشتن مکان") را پیش بینی می کرد. لئونارد اویلر را پلهای کونیکسبرگ مشکل و فرمول چند سطحی هستند مسلما اولین قضایای زمینه است. توپولوژی اصطلاح توسط فهرست یوهان بنیدیت معرفی شددر قرن نوزدهم، هرچند تا دهه های اول قرن بیستم، ایده فضای توپولوژی توسعه نیافت. تا اواسط قرن بیستم، توپولوژی تبدیل به شاخه ای عمده از ریاضیات شد.

یک تصویر سه بعدی از یک گره ی گردبادضخیم ، ساده ترین گره بی اهمیت است
فهرست
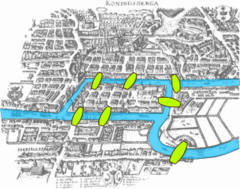
پلهای کونیکسبرگ یک مشکل حل شده توسط اویلر بود.
توپولوژی، به عنوان یک رشته ریاضی به خوبی تعریف شده، از اوایل قرن بیستم آغاز می شود، اما برخی نتایج جداگانه را می توان چندین قرن پیش بینی کرد. [3] در میان این ها پرسش های خاصی در هندسه مورد بررسی توسط لئونارد اویلر است. مقاله 1736 خود را در هفت پلان Königsberg به عنوان یکی از اولین کاربرد کاربردی توپولوژی در نظر گرفته شده است. [3] در 14 نوامبر 1750، اویلر به دوستی نوشت که او اهمیت لبه های یک چندضلعی را متوجه شده بود . این منجر به فرمول چند گانه آن شد ، V - E + F = 2 (جایی که V ، E وF به ترتیب تعداد رأس ها، لبه ها و چهره های چند ضلعی را نشان می دهد). بعضی از مقامات این تحلیل را به عنوان قضیه اول می دانند، که نشان دهنده تولد توپولوژی است. [4] [5]
کمک های بیشتر توسط آگوستین لوئیس کوشی ، لودویگ شلفلی ، یوهان بنیدیت لیست ، برنارد ریمان و انریکو بتی ساخته شده است . [6]فهرستی از اصطلاح "Topologie" را در Vorstudien zur Topologie ، که در سال 1847 در زبان آلمانی خود نوشته شده است، در سال 1847 با استفاده از کلمه برای ده سال در مکاتبات، قبل از اولین بار در چاپ، به کار برد. [7] "توپولوژی" فرم انگلیسی در سال 1883 در نیوجرسی Listing در مجله Nature برای تشخیص "هندسه کیفی از هندسه معمولی که در آن روابط کمی تحت تاثیر قرار می گیرند" استفاده شد. [8]اصطلاح "توپولوژیست" به معنای یک متخصص در توپولوژی در سال 1905 در مجله Spectator مورد استفاده قرار گرفت . [ نیازمند منبع ]
کار آنها اصلاح شد، ادغام شد و توسط Henri Poincaré بسیار گسترش یافت . در سال 1895، مقاله خود را بر روی Analysis Situs منتشر کرد که مفاهیمی را که در حال حاضر به عنوانهمولوگ و همولوگ شناخته می شوند شناخته شده است ، که در حال حاضر بخشی از توپولوژی جبری هستند . [6]
وحدت کار بر روی فضاهای تابعی از گئورگ کانتور ، ویتو ولترا ، چزاره Arzelà ، ژاک هادامارد ، جولیو آسکولی و دیگران، موریس فریشه معرفی فضای متریک در سال 1906. [9] یک فضای متریک در حال حاضر به یک مورد خاص از یک فضای توپولوژیک کلی در نظر گرفته ، با هر فضای توپولوژیک داده شده به طور بالقوه به بسیاری از فضاهای متریک متمایز منجر می شود. در سال 1914، فلیکس هاوسورف اصطلاح "فضای توپولوژیکی" را تعریف کرد و تعریف را برای آنچه که اکنون فضای هوسدورف نامیده می شود، تعریف کرد . [10]در حال حاضر، یک فضای توپولوژیک یک تعریف جزئی از فضاهای هادسفورد است که توسط Kazimierz Kuratowski در سال 1922 ارائه شده است . [11]
توپولوژی مدرن به شدت به ایده های نظریه مجموعه ای، که توسط گرگ کانتور در بخش بعدي قرن نوزدهم توسعه داده شد، به شدت وابسته است. کانتور، علاوه بر ایجاد ایده های اساسی نظریه مجموعه، مجموعه های نقطه ای را در فضای اقلیدسی به عنوان بخشی از مطالعه خود در مجموعه فوریه بررسی می کند . برای پیشرفت های بیشتر، به topology topology و topology جبری نگاه کنید.
توپولوژی می توان به طور رسمی به عنوان "مطالعه خواص کیفی از اشیاء خاص تعریف شده (به نام فضاهای توپولوژیک ) که ثابت تحت یک نوع خاصی از تحول (به نام نقشه مداوم )، به ویژه آن دسته از خواص که در زیر یک نوع خاصی از تحول معکوس ناوردا هستند ( هومومورفیسم نامیده می شود ). "
توپولوژی نیز برای اشاره به یک ساختار اعمال شده بر روی یک مجموعه X استفاده می شود که ساختار است که اساسا مجموعه X به عنوان فضای توپولوژیک را با توجه به مراقبت مناسب از خواص مانند همگرایی ، همبستگی و تداوم ، پس از تبدیل، مشخص می کند.
فضاهای توپولوژیکی به طور طبیعی در تقریبا در هر شاخه ریاضیات ظاهر می شود. این توپولوژی را یکی از ایده های متحد کردن بزرگ ریاضی دانسته است.
بینش انگیزشی در پشت توپولوژی این است که برخی از مشکلات هندسی نه به شکل دقیق اشیاء درگیر، بلکه به نحوی که با هم قرار می گیرند، بستگی دارد. به عنوان مثال، مربع و دایره دارای خواص فراوان مشترک هستند: آنها هر دو اجسام یک بعدی (از نقطه نظر توپولوژیکی) هستند و هر دو هواپیما را به دو بخش، قسمت درونی و قسمت خارج از هم جدا می کنند.
لئونارد ایلر در یکی از اولین مقالات در توپولوژی، نشان داد که مسیری را از طریق شهر Königsberg (اکنون کالینینگراد ) پیدا کرده است که دقیقا یک بار از هر هفت پل آن عبور می کند. این نتیجه بستگی به طول پل ها یا فاصله آنها از یکدیگر، اما فقط در خواص اتصال: که پل ها به آن جزایر یا بانک های رودخانه وصل می شوند. این هفت پل از مشکل Königsberg منجر به شاخه ای از ریاضیات شناخته شده به عنوان نظریه گراف .

یک تغییر شکل مداوم (یک نوع هومومورفیسم) یک لیوان یک شیرینی (توروس) و یک گاو به یک کره
به طور مشابه، قضیه توپ مودار از توپولوژی جبری می گوید که "می توان تخت مو بر روی یک توپ مودار بدون ایجاد یک شانه نمی cowlick ." این واقعیت بلافاصله به اغلب مردم متقاعد شده است، حتی اگر آنها ممکن است بیانی رسمی از قضیه را به رسمیت بشناسند، که هیچ حوزه بردارمستطیلی مستطیلی در حوزه وجود ندارد. همانطور که با پلهای Königsberg ، نتیجه به شکل کره بستگی ندارد؛ آن را به هر نوع لکه صاف اعمال می شود، تا زمانی که سوراخ ندارد.
برای مقابله با این مشکلات که به شکل دقیق اشیا تکیه نمی شود، باید در مورد آنچه که خواص این مشکلات به آن تکیه می کنند روشن باشد. از این نیاز مفهوم هومومورفیسم بوجود می آید. عدم امکان عبور از هر پل فقط یک بار به هر ترتیبی از پل های homomorphic به آنهایی که در Königsberg می گذرد، اعمال می شود و قضیه توپ مو با هر فضایی که homomorphic به یک کره است، اعمال می شود.
به طور مستقیم، دو فضای هومیومورفیک هستند، اگر بتوان آن را بدون برش یا چسباندن به یک دیگر تغییر داد. یک شوخی سنتی این است که یک توپولوژیست نمی تواند فنجان قهوه را از یک نان تقسیم کند، زیرا یک نان شیرین قابل قبول می تواند به یک فنجان قهوه تبدیل شود و با ایجاد یک نازک و به تدریج آن را بزرگتر کند، در حالی که سوراخ را در یک دسته قرار می دهد. [12]
هومومورفیسم را می توان به عنوان اساسی ترین معادله توپولوژی دانست . یکی دیگر از همبستگی همگانی است . این بدون توصیف فنی سخت تر است، اما مفهوم اصلی این است که دو اشیا همگن همبستگی معکوس دارند، اگر هر دوی آنها از "جوشیدن" بعضی از جسم بزرگتر ناشی می شوند.
کلاس های هم ارزانی از الفبای انگلیسی (یعنی لاتین) (بدون سرف)| هومومورفیسم | همبستگی homotopy |
|---|
 |  |
یک تمرین مقدماتی این است که حروف بزرگ حروف الفبای انگلیسی را طبق هومومورفیسم و هماهنگی هماتوپیایی طبقه بندی کنید . نتیجه بستگی به فونت مورد استفاده دارد و اینکه آیا سکته مغزی که حروف را تشکیل می دهند ضخامت دارند یا منحنی ایده آل بدون ضخامت هستند. ارقام در اینجا از فونت Myriad بدون سرصفحه استفاده می شود و فرض می شود که از منحنی ایده آل بدون ضخامت تشکیل شده است. همبستگی هماتوپی نسبت روانشناختی نسبت به هومورفیسم است؛ یک طبقه همجوشی تطبیقی می تواند چندین کلاس هومومورفیسم داشته باشد. مثال ساده هم سازي هماتوپی که در بالا شرح داده شده است می تواند در اینجا برای نشان دادن دو حروف معادل homotopy استفاده شود. به عنوان مثال، O در داخل P قرار می گیرد و دم P را می توان به قسمت "سوراخ" چسبیده است.
کلاس های هومومورفیسم عبارتند از:
- بدون حفره های مربوط به C، G، I، J، L، M، N، S، U، V، W و Z؛
- بدون سوراخ و سه دم با E، F، T، و Y؛
- بدون سوراخ و چهار دم با X؛
- یک سوراخ و بدون دم با D و O مطابقت دارد؛
- یک سوراخ و یک دم با P و Q؛
- یک سوراخ و دو دم با A و R؛
- دو سوراخ و بدون دم با B؛ و
- یک نوار با چهار دم با H و K مطابقت دارد. "نوار" در K تقریبا برای دیدن کوتاه است.
کلاس های هومیوپاتی بزرگتر هستند، زیرا دم می تواند به یک نقطه تقلیل یابد. آن ها هستند:
- یک سوراخ
- دو سوراخ، و
- بدون سوراخ
برای طبقه بندی حروف به درستی، ما باید نشان دهیم که دو حرف در همان کلاس معادل هستند و دو حرف در کلاس های مختلف معادل نیست. در مورد هومیو مورفیسم، با انتخاب نقاط می توان این کار را انجام داد و نشان داد که حذف آنها حروف متفاوت است. به عنوان مثال، X و Y هومومورفیک نیستند زیرا حذف نقطه مرکزی X برگ چهار قطعه؛ هر نقطهای در Y مربوط به این نقطه است، حذف آن می تواند حداکثر سه قطعه را ترک کند. مورد برابر همنوپوپی سخت تر است و نیاز به یک استدلال دقیق تر نشان می دهد که یک متغیر جبری، مانند گروه اساسی ، در کلاس های ظاهری متفاوت متفاوت است.
توپولوژی نامه دارای پیوند عملی در تایپوگرافی استنسیل است . به عنوان مثال، تراژدی فونت Braggadocio از یک قطعه مواد متصل ساخته شده است.
توپولوژی در مجموعه [ ویرایش ]
مقاله اصلی: فضای توپولوژیک
توپولوژی اصطلاح همچنین به یک ایده ی ریاضی خاص در بخش ریاضیات به نام توپولوژی اشاره دارد. به صورت غیر رسمی، یک توپولوژی می گوید که چگونه عناصر مجموعه ای به یکدیگر متصل می شوند. همان مجموعه می تواند توپولوژی های مختلف داشته باشد. به عنوان مثال، خط واقعی ، هواپیمای پیچیده (که یک فضای برداری یک بعدی یکپارچه) و مجموعه کانتور می تواند به عنوان یک مجموعه با توپولوژی های مختلف در نظر گرفته شود.
به صورت رسمی اجازه دهیم X یک مجموعه باشد و اجازه دهید τ یک خانواده از زیر مجموعه های X باشد. سپس τ نامیده می شود توپولوژی در X اگر:
- هر دو مجموعه خالی و X عناصر τ هستند .
- هر یک از عناصر τ یک عنصر از τ است .
- هر نقطه تقاطع عناصر محدود از τ یک عنصر از τ است .
اگر τ یک توپولوژی در X باشد ، پس جفت ( X ، τ ) فضای توپولوژیکی نامیده می شود. نماد X τ ممکن است برای نشان دادن یک مجموعه X که دارای توپولوژی خاص τ است .
اعضای τ مجموعه باز در X نامیده می شود . اگر مجموعه آن در τ (یعنی مکمل آن باز است)، زیر مجموعه ای از X بسته می شود . زیر مجموعه ای از X ممکن است باز، بسته، هر دو ( مجموعه کلوپن )، یا نه. مجموعه خالی و X خود همواره بسته و باز هستند. یک زیرمجموعه از X شامل یک مجموعه باز شامل یک نقطه x محله " x " نامیده می شود .
توابع پیوسته و هومورفیسم [ ویرایش ]
مقالات اصلی: عملکرد مداوم و هومورفیسم
تابع و یا نقشه از یک فضای توپولوژیک را به دیگری است به نام مداوم اگر تصویر معکوس هر مجموعه باز باز است. اگر تابع نقشه اعداد واقعی را به اعداد واقعی (هر دو فضاهای با توپولوژی استاندارد)، پس این تعریف پیوسته معادل تعریف پیوسته در حساب است . اگر یک عملکرد مستمر یک به یک و بر روی آن باشد، و اگر معکوس از تابع نیز مداوم باشد، این تابع به نام هومومورفیسم نامیده می شود و حوزه تابع گفته می شود به دامنه homomorphic است. راه دیگری برای گفتن این است که این تابع یک گسترش طبیعی به توپولوژی دارد. اگر دو فضا هومومورفیک باشند، خواص توپولوژیکی یکسان دارند و از لحاظ توپولوژیکی یکسانند. مکعب و حوزه ها به صورت مسطح هستند، مانند فنجان قهوه و نان. اما این دایره به دونات منحرف نمی شود.
مقاله اصلی: منیفولد
در حالی که فضاهای توپولوژیکی می توانند بسیار متنوع و عجیب و غریب باشند، بسیاری از مناطق توپولوژی بر روی کلاس فضایی شناخته شده به عنوان منیفوالات متمرکز می شوند. یک چندفیلدیک فضای توپولوژیک است که در نزدیکی هر نقطه شبیه فضای اقلیدسی است. بطور دقیقتر، هر نقطه از یک نفر چند برابر بعدی دارای محله است که homeomorphic به فضای اقلیدسی بعد N. خطوط و حلقه ها ، اما نه رقم هشتم ، چندبعدی یک بعدی هستند. چندبعدیهای دو بعدی نیز سطوح نامیده می شوند . مثالها شامل هواپیما هستند، کره و توور، که همه آنها بدون درهم آمیختن در سه بعد تحقق مییابد، بلکه بطری کلین و هواپیما واقعی ، که نمیتوانند آن را تحمل کنند.
توپولوژی عمومی [ ویرایش ]
مقاله اصلی: توپولوژی عمومی
توپولوژی عمومی شاخه ای از توپولوژی است که با تعاریف و ساختارهای مجموعه ای نظری مورد استفاده در توپولوژی مورد استفاده قرار می گیرد. [13] [14] این پایه و اساس بسیاری از سایر شاخه های توپولوژی، از جمله توپولوژی های گسسته، توپولوژی هندسی و توپولوژی جبری است. نام دیگری برای توپولوژی عمومی توپولوژی مجموعه نقطه است .
مفاهیم اساسی در توپولوژی نقطه ای عبارتند از پیوستگی ، فشردگی و وابستگی . به طور مستقیم، توابع پیوسته، نقاط نزدیک را به نقاط نزدیک می رسانند. مجموعه های جمع و جوری هستند که می توانند توسط مجموعه های محدودی از اندازه های خودسرانه کوچک پوشانده شوند. مجموعه های متصل مجموعه ای هستند که نمی توانند به دو قسمت تقسیم شوند. کلمات کلیدی در اطراف ، به طور خودسرانه کوچک و دور از هم می توانند با استفاده از مجموعه های باز، دقیق باشند. اگر ما تعریف مجموعه باز را تغییر دهیم، ما تغییرات توابع پیوسته، جمع و دسته و مجموعه متصل می کنیم. هر انتخاب تعریف برای مجموعه باز یک توپولوژی نامیده می شود. مجموعه ای با توپولوژی فضای توپولوژی نامیده می شود .
فضاهای متریک یک طبقه مهم از فضاهای توپولوژیکی هستند که در آن فاصله ها می توانند یک عدد به نام متریک تعیین شوند . داشتن یک متریک ساده بسیاری از اثبات ها، و بسیاری از فواصل کلی توپولوژیک، فضاهای متریک هستند.
توپولوژی جبری [ ویرایش ]
مقاله اصلی: توپولوژی جبری
توپولوژی جبری شاخه ای از ریاضیات است که از ابزارهای جبر انتزاعی برای مطالعه فضاهای توپولوژی استفاده می کند. [15] هدف اصلی یافتن جاذبه های جبری است که فضاهای توپولوژیکی راتا هومومورفیسم طبقه بندی می کند ، هرچند معمولا بیشتر به همبستگی هماتوپیایی طبقه بندی می شود.
مهمترین این تعاریف، گروههای همگانی ، همولوگ و هماهنگی هستند .
گرچه توپولوژی جبری عمدتا از جبر استفاده می کند تا مشکلات توپولوژیکی را بررسی کند، گاهی اوقات نیز ممکن است از توپولوژی برای حل مشکلات جبری استفاده شود. به عنوان مثال، توپولوژی جبری اجازه می دهد تا برای یک اثبات مناسب که هر زیر گروه یک گروه آزاد دوباره یک گروه آزاد است.
توپولوژی دیفرانسیل [ ویرایش ]
مقاله اصلی: توپولوژی دیفرانسیل
توپولوژی دیفرانسیل زمینهیی است که با توابع متمایز در چندیفلهای متمایز توافق میکند . [16] نزدیک به هندسه دیفرانسیل مرتبط است و با هم آنها تئوری هندسی از چندفیلد های متفاوت را تشکیل می دهند.
به طور خاص، توپولوژی دیفرانسیل، خواص و ساختارهایی را که نیاز به ساختار صاف در یک چندجملهای دارند تعریف می کند. منیفولد های صاف "نرمتر" نسبت به منیفولدها با ساختارهای هندسی اضافی است که می توانند بعنوان مانع از انواع خاصی از معادلات و تغییر شکل هایی که در توپولوژی دیفرانسیل وجود دارند ، عمل کنند . به عنوان مثال، حجم و انحنای ریمانی منحصر به فرد هستند که می توانند ساختارهای مختلف هندسی را در یک مانیفولد صاف مشابه تشخیص دهند، یعنی می توان آنها را به طور مسطح "مسطح کردن" مینی فویل های خاصی، اما ممکن است نیاز به تخریب فضا و تاثیر بر انحنا یا حجم باشد.
توپولوژی هندسی [ ویرایش ]
مقاله اصلی: توپولوژی هندسی
توپولوژی هندسی شاخه ای از توپولوژی است که عمدتا بر روی چند فویل های کم ابعاد (یعنی فضاهای ابعاد 2،3 و 4) و تعامل آنها با هندسه تمرکز دارد، اما همچنین شامل برخی از توپولوژی های بعدی می شود. [17] [18] برخی از نمونه هایی از موضوعات در توپولوژي هندسی عبارتند از: گرایش ، تقسیم بندی ، مسطح بودن موضعی ، تقلید و قضیه Schönflies مسطح و مسطح .
در توپولوژي با ابعاد بزرگ، طبقات ويژه يك ويژگي اساسي هستند و نظریه جراحی نظریه کلیدی است.
توپولوژی کم بعدی به شدت هندسی است، همانطور که در قضیه uniformization در 2 ابعاد نشان داده شده است - هر سطحی یک معیار انحنای ثابت را می پذیرد؛ هندسه، یکی از 3 هندسه ممکن است: انحنای مثبت / کروی، انحنای صفر / تخت، منحنی منفی / هیپربولیک - و فرضیه geometrization (در حال حاضر قضیه) در 3 ابعاد - هر 3 - چند منظوره را می توان به قطعات، برش هر قطعه دارای یکی از هشت هندسه ممکن است.
توپولوژی دو بعدی می تواند به عنوان هندسه پیچیده در یک متغیر ( سطوح ریمان منحنی پیچیده) مورد مطالعه قرار گیرد - با قضیه uniformization، هر کلاس conformal از معیارها معادل یک مجموعه منحصر به فرد است، و توپولوژی 4 بعدی را می توان از نقطه مشاهده هندسه پیچیده در دو متغیر (سطوح پیچیده)، هر چند هر 4 مینی فلفل یک ساختار پیچیده را قبول نمی کند.
گاهی اوقات نیاز به استفاده از ابزار توپولوژی است، اما مجموعه ای از نقاط در دسترس نیست. در توپولوژی بی معنی یکی به جای در نظر شبکه از مجموعه های باز، به همان مفهوم اصلی تئوری،[19] در حالی که توپولوژی ثانیه Grothendieck ساختارهای تعریف شده در خودسرانه دسته اجازه می دهد که تعریف قرقره بر روی آن دسته، و با که تعریف نظریه های cohomology عمومی . [20]
برنامه های کاربردی [ ویرایش ]
زیست شناسی [ ویرایش ]
نظریه گره ، یک شاخه توپولوژی، در زیست شناسی مورد استفاده قرار می گیرد تا اثر آنزیم های خاصی را بر روی DNA بررسی کند. این آنزیم ها DNA را متصل، پیچیده و مجددا متصل می کنند، و باعث می شود که اثرات قابل مشاهده مانند الکتروفورز کندتر شود . [21] توپولوژی نیز در زیست شناسی تکاملی برای نشان دادن رابطه بین فنوتیپ و ژنوتیپ استفاده می شود . [22] شکل های فنوتیپی که کاملا متفاوت می شوند، می توانند تنها با چند جهش جدا شوند، بسته به اینکه چگونه تغییرات ژنتیکی به تغییرات فنوتیپی در طول توسعه می پردازند. در علوم اعصاب، مقادیر توپولوژیکی مانند ویژگی هایلر و تعداد Betti برای اندازه گیری پیچیدگی الگوهای فعالیت در شبکه های عصبی مورد استفاده قرار گرفته اند.
علم کامپیوتر [ ویرایش ]
تجزیه و تحلیل داده های توپولوژیکی از تکنیک های توپولوژی جبری برای تعیین ساختار مقیاس بزرگ یک مجموعه استفاده می کند (به عنوان مثال، تعیین اینکه آیا ابر نقاط کروی یا توریال است ).روش اصلی مورد استفاده در تجزیه و تحلیل داده های توپولوژی:
- مجموعه ای از نقاط داده را با یک خانواده از مجتمع های ساده ، با نمای پارامتر مجاورت، جایگزین کنید .
- این مجموعه توپولوژیکی را از طریق توپولوژی جبری تجزیه کنید - به طور خاص، از طریق تئوری همخوانی مداوم . [23]
- همگنی دائمی مجموعه داده ها را به صورت یک نسخه پارامتریک از یک شماره Betti ، که بارکد نامیده می شود، رمزگذاری کنید . [23]
توپولوژی مربوط به فیزیک در زمینه هایی مانند فیزیک ماده چگال ، [24] نظریه میدان کوانتومی و کیهان شناسی فیزیکی است .
وابستگی توپولوژیکی خواص مکانیکی در مواد جامد به رشته مهندسی مکانیک و علوم مواد علاقه مند است . خواص الکتریکی و مکانیکی به ساختار شبکه و ساختار مولکول ها و واحدهای ابتدایی مواد بستگی دارد . [25] مقاومت فشاری از مچاله توپولوژی در تلاش برای درک قدرت به وزن بالا، چنین ساختارهایی که عمدتا فضای خالی مطالعه قرار گرفت. [26] توپولوژی در مکانیک تماس بااهمیت بیشتر است که در آن وابستگی سختی و اصطکاک بر ابعاد از سازه های سطح موضوع مورد علاقه با برنامه های کاربردی در فیزیک چند بدن است.
یک نظریه میدان کوانتومی توپولوژی (یا نظریه میدان توپولوژیک یا TQFT ) یک نظریه میدان کوانتومی است که محاسبات توپولوژیکی را محاسبه می کند .
اگر چه TQFT ها توسط فیزیکدانان اختراع شده اند، آنها نیز از علاقه ریاضی هستند، که در میان دیگر موارد، نظریه گره ، نظریه چهار مینی فولد در توپولوژی جبری و نظریه فضاهای مدول در هندسه جبری، مرتبط است. دونالدسون ، جونز ، ویتن ، و کنسویچ همه مدال فیلد را برای کار مرتبط با نظریه میدان توپولوژیک به دست آوردند .
طبقه بندی توپولوژیکی چندبعدی کالیبای یو ، پیامدهای مهمی در نظریه رشته دارد ، زیرا چندبعدی های مختلف می توانند انواع مختلف رشته ها را حفظ کنند. [27]
در کیهان شناسی، توپولوژی می تواند برای توصیف شکل کلی جهان استفاده شود. [28] این ناحیه تحقیق معمولا به عنوان توپولوژی فضا زمان شناخته می شود .
موقعیت های احتمالی یک ربات را می توان با یک منیفولد به نام فضای پیکربندی توصیف کرد . [29] در حوزه برنامه ریزی حرکت ، مسیرهای بین دو نقطه در فضای پیکربندی پیدا می شود. این مسیرها یک حرکت از مفاصل ربات و سایر قسمت ها را به صورت مورد نظر نشان می دهد. [30]
بازی ها و پازل [ ویرایش ]
پازل های پیچ و خم بر اساس جنبه های توپولوژیک از اشکال و اجزای پازل است. [31] [32] [33] [34]
هنر فیبر [ ویرایش ]
برای ایجاد یک پیوست پیوسته از قطعات در ساخت و ساز مدولار، لازم است که یک مسیر ناگسستنی در یک نظم که هر قطعه را احاطه کرده است، ایجاد شود و تنها یک بار لبه هر لبه را ایجاد کند. این فرآیند کاربرد مسیر یولر است . [35]
منبع
https://en.wikipedia.org/wiki/Topology







 در این وبلاگ به ریاضیات و کاربردهای آن و تحقیقات در آنها پرداخته می شود. مطالب در این وبلاگ ترجمه سطحی و اولیه است و کامل نیست.در صورتی سوال یا نظری در زمینه ریاضیات دارید مطرح نمایید .در صورت امکان به آن می پردازم. من دوست دارم برای یافتن پاسخ به سوالات و حل پروژه های علمی با دیگران همکاری نمایم.در صورتی که شما هم بامن هم عقیده هستید با من تماس بگیرید.
در این وبلاگ به ریاضیات و کاربردهای آن و تحقیقات در آنها پرداخته می شود. مطالب در این وبلاگ ترجمه سطحی و اولیه است و کامل نیست.در صورتی سوال یا نظری در زمینه ریاضیات دارید مطرح نمایید .در صورت امکان به آن می پردازم. من دوست دارم برای یافتن پاسخ به سوالات و حل پروژه های علمی با دیگران همکاری نمایم.در صورتی که شما هم بامن هم عقیده هستید با من تماس بگیرید.